Beautiful MatrixPlot’s of E8 and H4. Below is the E8 Gram matrix:

H4+H4φ 8D Gram matrix:

H4φ 4D Gram matrix:


Beautiful MatrixPlot’s of E8 and H4. Below is the E8 Gram matrix:
H4+H4φ 8D Gram matrix:
H4φ 4D Gram matrix:
If you are working with topological field theoretic Hopf fibrations, chaotic attractors, and/or E8 and any of its extensive set of maximal subgroups, polytopes, lattices and codes or its folded (rotated) H4 family of polytopes (e.g. 600 and 120 cells in their vertex, cell, face, and edge orientations), VisibLie_E8 can group theoretically integrate all of these concepts visually!
Click on the PNG image to get the SVG version.



This is all also related to the Clifford algebra of Cl(9,0) with the Bott Periodicity clock showing the related algebras (click for SVG):

The Bott periodicity clock uses a Mod 8 clock face with second hand mnemonics taken from the I-Ching with the real Clifford algebra of signature (p,q) denoted as Clp,q(R)=Cl(p,q). An animated (GIF) example is on the Bott Periodicity Wikipedia page.
A few more Hopf geometries:



If anyone is using my E8 to H4 folding matrix in their research, this post provides a bit of context from the original form (2012-2014) as it was improved to the current form. Drop me an email if you are using my work or have questions, or find errors, etc.
See here (Baez), here (Castro-Perelman), here (Schmidt), here (Ruen on WP E8 Polytope D4-E6 “Mox” projections) for properly cited examples.
I am working with a few who are using my work on cryptography, quantum computing, and computation optimization, but they have yet to post or publish results.
Of course, many authors may or may not be aware of their use of my prior art (so it goes without citation) e.g. here (Nielsen) using the fine structure constant α-n as a hyper-dimensional geometric nD scaling factor for the fundamental constants, such as my definition of a new Unit of Measure (UoM) distinct from Natural Units from 1998-2001).
The image below is also available as a Mathematica notebook (NB) or PDF. Click the PNG image for the SVG version.
The first part reviews the current Hermitian, centrosymmetric, traceless (Tr=0), and volume preserving (Det = 1) form of the folding matrix (U).
The last part reviews the traceless Hermitian unitary matrix (uU) of determinant 1 (i.e. A7=SU(8)) with characteristic polynomial |coefficients| of the 5th row of the Pascal triangle (1,4,6,4,1}. This matrix has the same characteristic polynomial as that of the 3-Qubit Hadamard matrix. Both are related to QM Hadamard, CNOT and SWAP gates and Pauli matrices from which it, cmU, and U are constructed.
Below that is another matrix analysis of the 6 8×8 Dirac matrices (i.e. DiracMatrix[#, Dimension -> 6]&/@Range@6) with the Identity and +/- Traceless Identity matrices prepended. These have similar properties to uU with the addition of being (skew)Hamiltonian matrices.

Now for good measure, we show the matrix characteristics of the 2×2 Pauli, 3×3 Gell-Mann, and 4×4 Dirac matrices:

And finally, we analyze the 8×8 Dimension 6 n=4 Dirac Matrices:

My latest ToE paper here. This paper presents compelling E8 group-theoretic properties that are found in the set of 240 O and N H-bond acceptors which support Watson-Crick codon:anticodon pairing. Empirically correct consequences are deduced from the group-theoretic model.
This paper is related to another recent post here.

Here is the WikiMedia version of the Canonical Watson-Crick Acceptor Sites (Figure 11).

Stainless & Glass Public Art Sculpture in Tucson By Ray King.
It’s shape is similar to, but not exactly, a Pentakis Icosidodecahedron, which is 3D the orthographic shadow of the 4D of H4 (and H4φ) 600-cell (s) obtained by folding the 8D object (E8) to 4D. E8 is also known as the 421 polytope.
I thought it was interesting that the 2D color shadow on the patio that looks like my E8 diagram called a E8 Petrie Projection:


Links to information on this object are here and here.

This post used a symbolic permutation list provided in the “rf-poytopes” Polytope Discord discussion thread to produce the Coxeter’s (cell-first, vertex-first, edge-first, and face-first) “simplified” sections shown below.
You can navigate the matrices of links below or simply download the ZIP files for the SVG sectioning for Jonathan Kirk’s Convex Regular Face (CRF) here (40 Mb). The overall convex hull of the cell-first sectioning is similar to, but not the same as, a (496-diminished form of) the H4 BiRectified 600-cell (sectioning of that is shown here).

For high quality 3D interactive Mathematica Notebook (NB), and SVG or PDF files, you can download them here: NB SVG PDF
Cell Vertex Edge Face
 |
 |
 |
 |
Cell Vertex Edge Face
|
|
|
|
|
This post will document some work I am doing related to E8, H4, and the hypercomplex forms of algebras and groups. So stay tuned….




My artwork is being shown at Wilde-Meyer Fine Art Gallery.
The 8 works include everything from macro images of light refraction in Labradorite granite, the recent (not-so northern) lights of the Aurora Borealis at midnight in Tucson over the Catalinas, star trails around the North star (Polaris), and astrophotography from light collected from my own cameras and telescope, as well as those which were creatively processed using various frequencies of light data collected and publicly shared by the scientists using Hubble and James Webb space telescopes. The two paintings to the right are astronomy related works by Lawrence Lee.

Two of these pieces will be on display at the UofArizona Lunar Planetary Lab (LPL) Art Show coming up at the end of February 2026.
This post is a work in process, so check back for the latest visualizations and data. Today (Dec. 31 2025) I finally finished a major update to the section SVG files from the first update of 12/16/2025. Have a blessed New Year for 2026 and beyond!
These were improved a bit on 01/04/2026 and on 01/06/2026 I added more informative Thumbnail icons in the matrix links that include the vertex-edge-face-cell OverallHull images. On 01/12/2026 I added the Snub 24-cell orientations. On 01/20/2026 I improved the visualizations. On 01/26/2026 I increased the thumbnail font and corrected a 24-cell Wythoffian permutation definition.
So if you downloaded previous files, you may want to take another look, as some of the output had anomalous data that didn’t render, along with other errors (due to the way I computed approximate equality between norms). In order to get this done, I realized I was thrashing my Solid State Drive (SSD) due to memory swapping. It died due to that (SSDs have limited writes!), so I had to rebuild the machine with 64 Gb RAM to keep the computations in RAM.
Drop me an email if you find anything that needs correction.

For fully interactive Mathematica NB (and higher quality SVG, PDF, as well as PNG files for all of the combined and overall hull pairs as shown above) in all 15 Weyl orbit permutations, download them here:
H4 600-cell: NB (50 Mb) SVG (50 Mb) PDF (25 Mb)
F4 288-cell: NB (10 Mb) SVG (25 Mb) PDF (10 Mb)
D4 24-cell: NB (5 Mb) SVG (15 Mb) PDF (10 Mb)

Please see several prior posts presenting (with now much improved) sectioning visualizations of Coxeter’s Regular Polytope book Table V here, 120-diminished rectified 120-cell (aka. Swirl-Prism) here, and 90=6×15 matrices of links to the 15 Weyl orbit permutations (with associated Coxeter-Dynkin diagrams) of the 4-polytope 5, 16/8, 24, 600/120 cell sections/animations here.
This post now presents the 60=[4 cell-first, vertex-first, face-first, and edge-first orientations of 15 Weyl orbits] visualizations for the self-dual 24-cell (D4), the disphenoidal 288-cell (F4), and H4 600-cell (which has the same content as its dual the 120-cell by the symmetry of the Coxeter-Dynkin diagram).
These are generated using 4 quaternionic rotations. The one off a main orbit orientation (i.e. using the e0=1 identity quaternion rotation) is either the vertex or cell first orientation for each of the 15 Weyl orbit permutations, with the other rotation being e2+e3. Then for edge and face first orientation rotations, depending on the 24, 288, or 600 cell type, they will be one of either e1+e2+e3 & e1+2e2+e3 (for 24 & 288 cells) or e0+φe1 & e0+e1+e2 (for 600/120 cells).
vZome has a very nice (and fun) website curated by Scott Vorthmann with some information on quaternion generation of cell-vertex-face-edge first orientations here.
The main orbits are (or can also be) generated by using quaternions and the A, B-C, D-F, E-H group theoretic relationships. I actually use octonionic multiplication operations with multiplication tables from the 480 possible where the first (of 7 triads) are the quaternion of 0123. This means the last four dimensions of the octonion (i.e. 4567 or {l, li, lj, lk}) are {0,0,0,0}.
You can navigate the matrices of links below or simply download the ZIP files for the SVG sectioning for the 600-cell here (900 Mb), 288-cell here (200 Mb), and 24-cell here (150 Mb).
Cell Vertex Edge Face

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
Cell Vertex Edge Face

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
Cell Vertex Edge Face

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
Cell Vertex Edge Face

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|
Cell Vertex Edge Face

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|
Cell Vertex Edge Face

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|
An interesting set of prisms are in the F4 disphenoidal 288-cell’s omni-truncated sections (below):

If you have access to Wolfram’s Mathematica, see my notebook with code and data that may be helpful here (135Mb). A PDF is here (65Mb). This has detail on the octonion (E82 and E83) based constructions for both the 24D Leech lattices as well as the 16D Barnes-Wall lattice shown at the bottom of this post.
The Leech lattice is a sub-quotient of the largest of the sporadic finite simple groups, namely the Monster group. It is related to (and can be constructed by) E8 and the 23rd Niemeier lattice of E83. The 24D Leech lattice is interesting to the physics of sphere packing, error-correcting codes, and possibly unifying General Relativity (GR) with Quantum Mechanics (QM). String theory was founded on the ideas related to its relationship to the Monster group and how 24 dimensions relate to the bosonic energy levels of the partition function on a torus. For more on the Monster and Group Theory, see my post here.
But taking things down a 8D (Bott periodic) notch, roughly speaking the 16D Barnes-Wall lattice is related to E8 in the same way by BW16=E82.
I found some very nice recent visualizations on the BW16 WP article by Misaki Ohta with related arXiv papers. He provided links to related code and data here. Below are my renderings using that provided information.


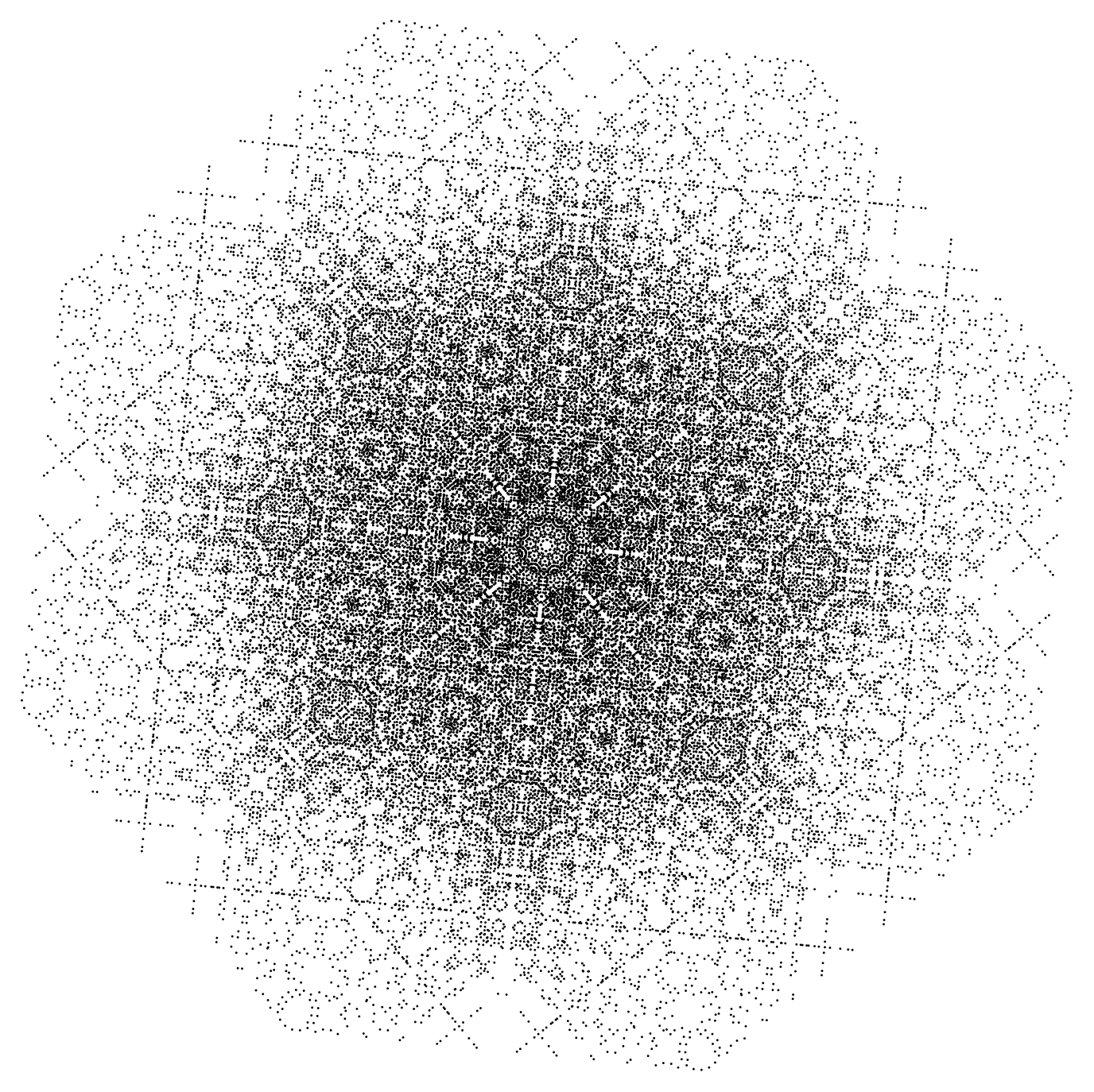
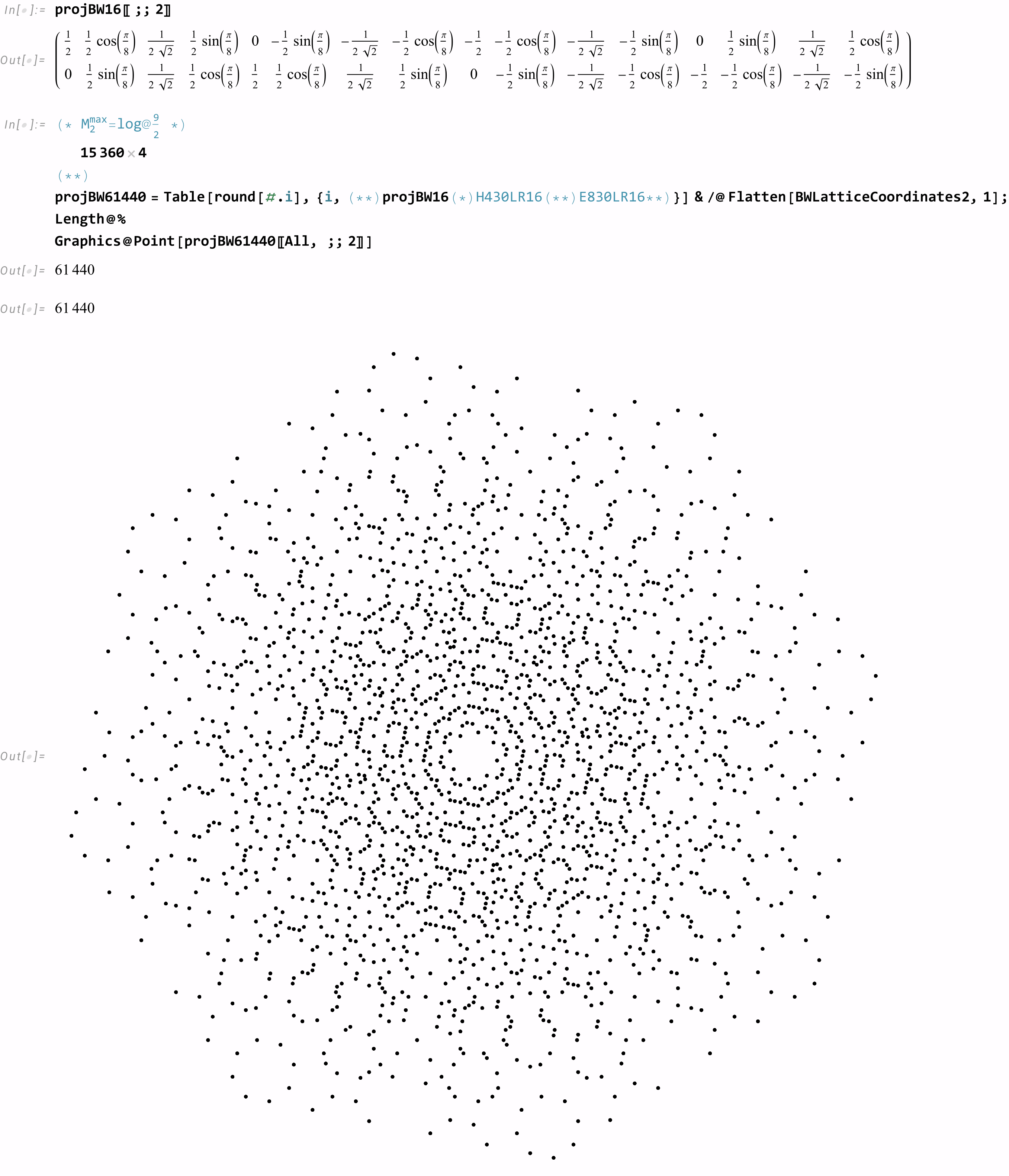
It is interesting to note that if one projects the 61440 2nd shortest 16D vectors of BW16 using orthogonal projection mapping ℝ¹⁶ → ℝ² (i.e. to B8 basis vectors [x=Cos, y=Sin]@(0-15)π/8 used for E8 below vs. the proper (0-15)π/16 B16 as done above), we get a similar result as projecting the 2nd shortest 8D vectors of E8 using the same basis shown as grey vertices in Fig 2 of arXiv:2506.11725:
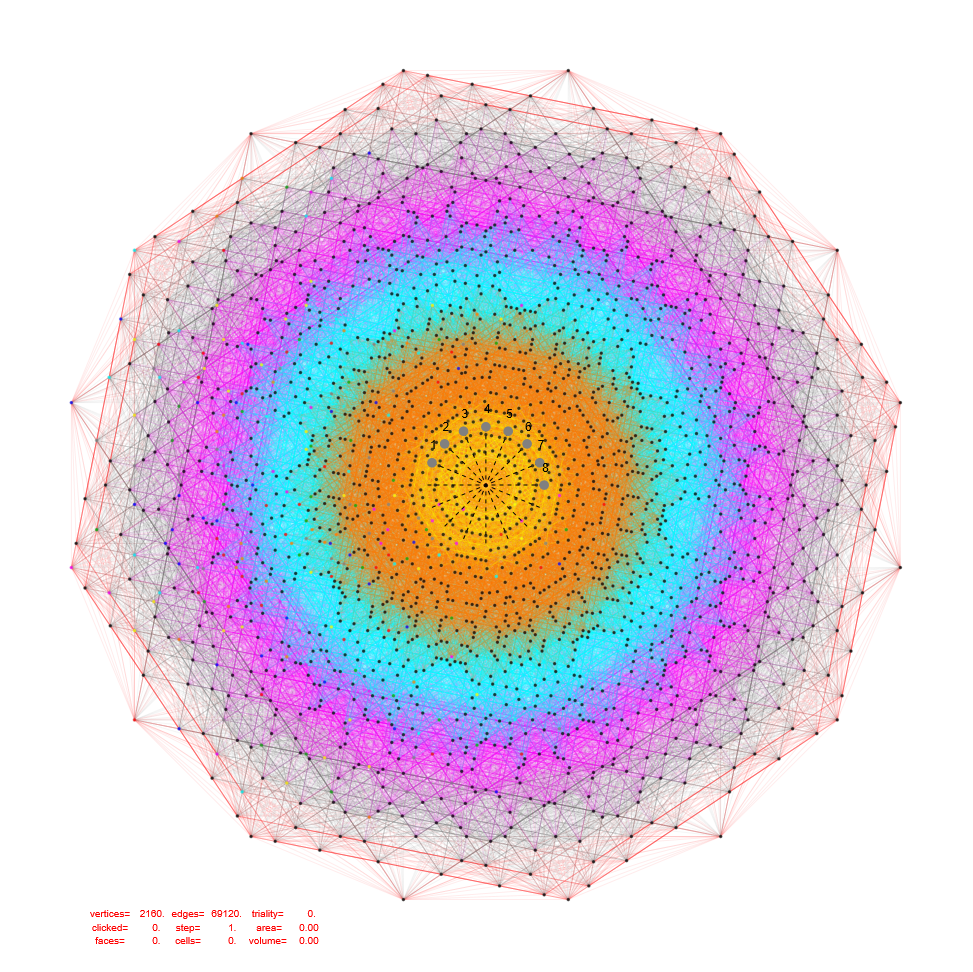
Projecting the 2160 2nd shortest 8D vectors of E8 using the B8 basis vectors including 69120 edges of 8D norm=√8 with colors assigned by projected edge length (notice the similarity in the vertex locations of the figure above):
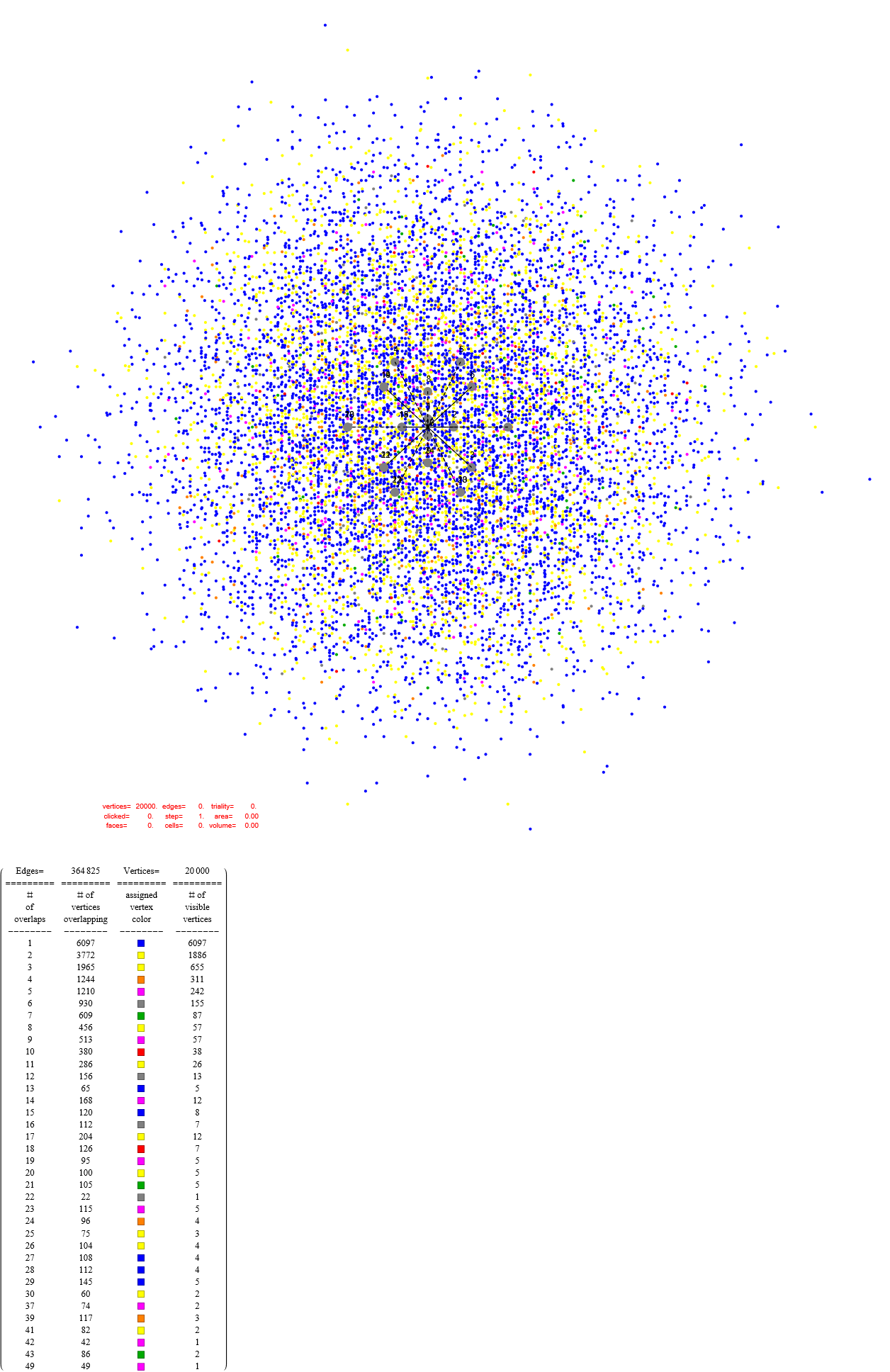
Projecting the 4320 shortest 16D vectors of BW16 using orthogonal projection mapping ℝ¹⁶ → ℝ² using the B8 basis vectors [x=Cos, y=Sin]@(0-15)π/8 gives the results shown in Fig. 2 as red and blue vertices:

This time with edges colored by projected edge lengths:

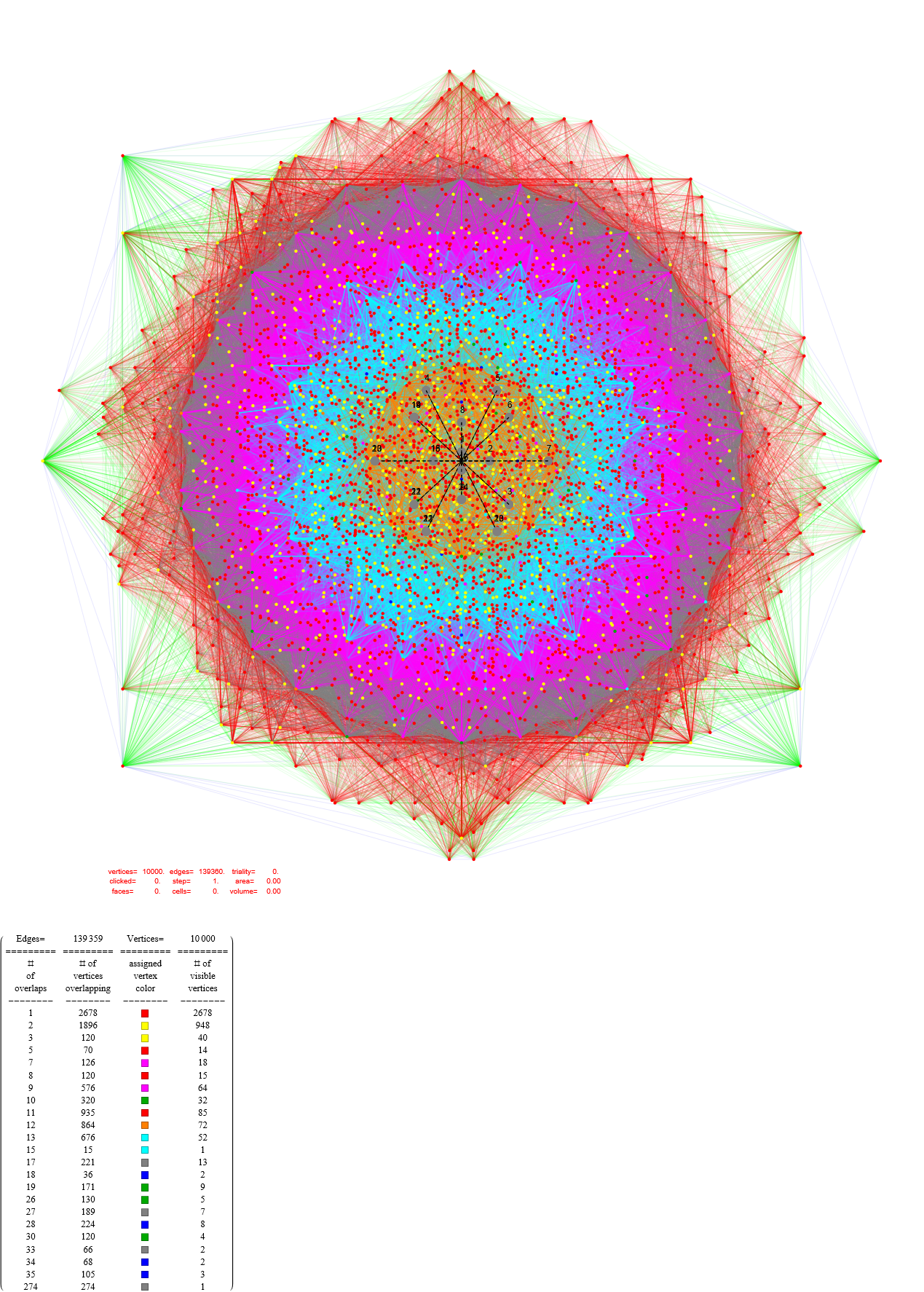
Now, getting creative with the 16D projections of the 4230 BW16, if we double the E8 Petrie basis vectors we get a similar result with 480+1 visible vertices with one at the origin w/240 overlapping vertices. There are 240 yellow with no overlaps and 240 blue with 16 overlaps each. There are 604800 norm=4 edges using roughly the same color pallet as my WP E8 Petrie image. This makes it easier to see the difference between the 4230 BW16 and the normal E8 Petrie projection, which seem to share the grid-like pattern of the 24-cells within the folded E8 = H4 + φ H4 :

This is the same as above, but using the 61440 vertex BW16 with no edges (given there are millions of them). Please note that the number of visible vertices is the same as E8241 at 2160!

Octonion based Barnes-Wall and Leech Lattice visualizations based on my implementation of work from Geoffrey Dixon and Robert Wilson:


{kind=link}