For Lisi’s latest ideas on a “Lie Group Cosmology (LGC)” ToE, see http://arxiv.org/abs/1506.08073.
Be warned, it is over 40 heavy pages.
He also posted a new projection on FB.
He uses the (H)orizontal and (V)ertical projection vectors of:
H = {.12, -.02, .02, .08, .33, -.49, -.49, .63};
V = {-.04, .03, .13, .05, .20, .83, -.45, .19};
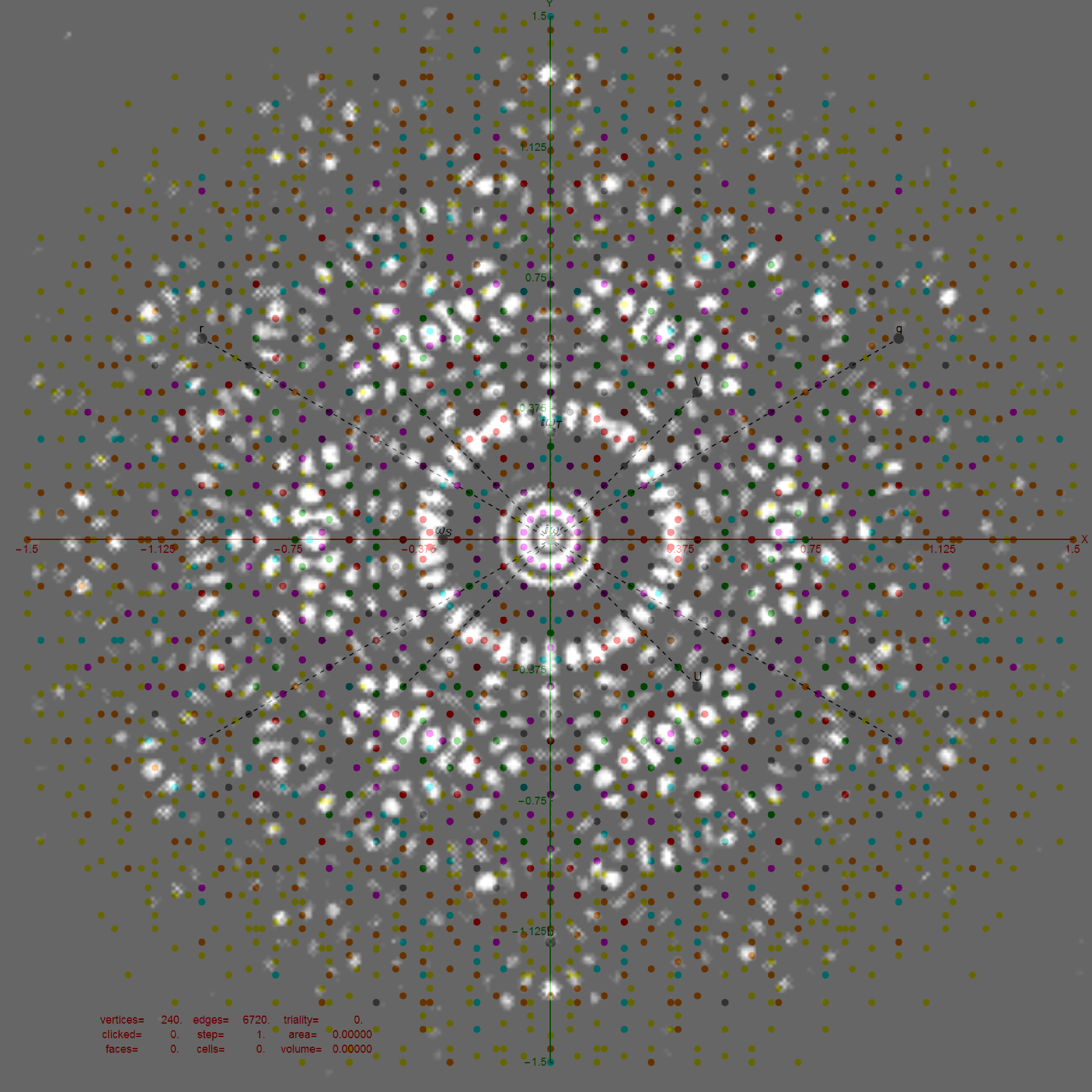
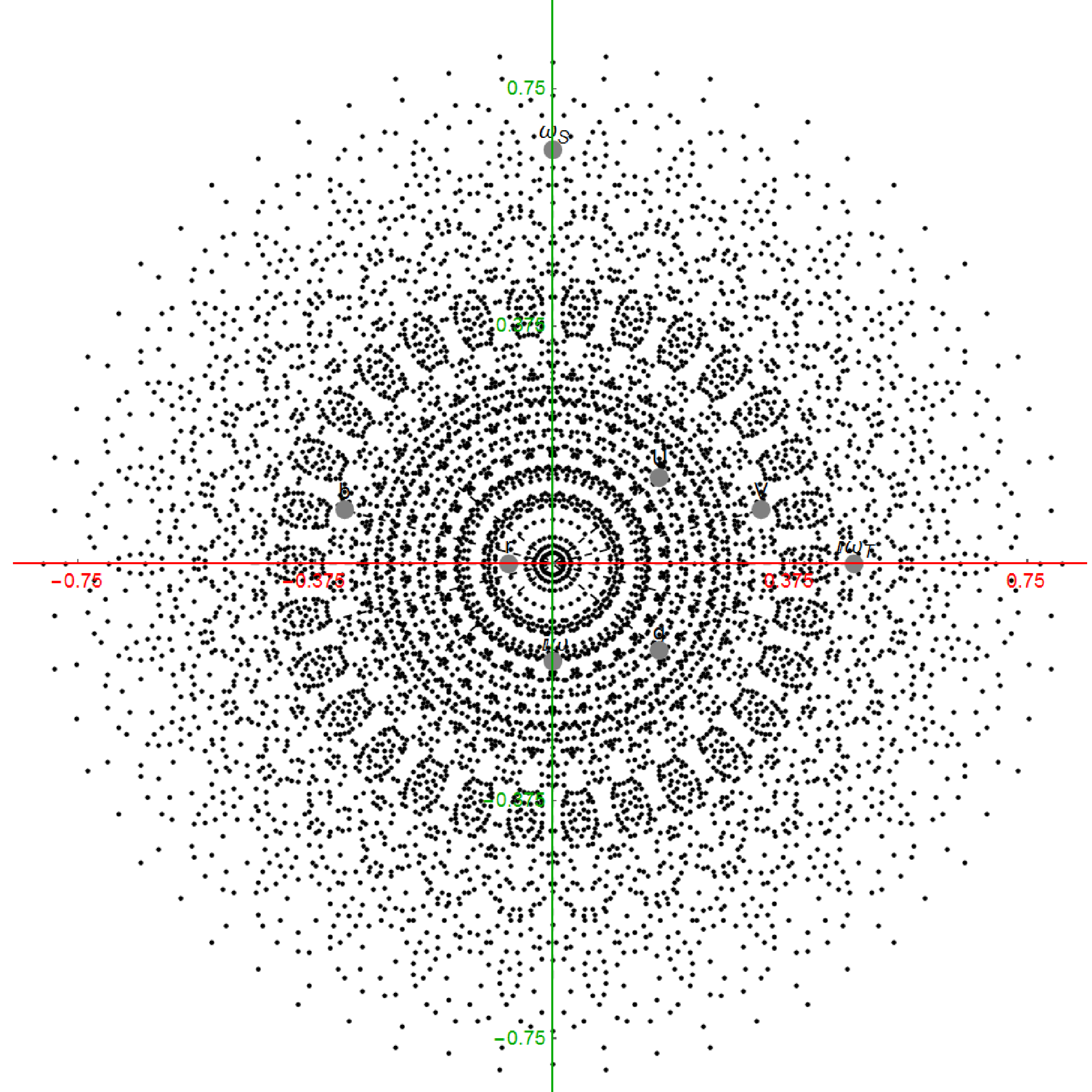
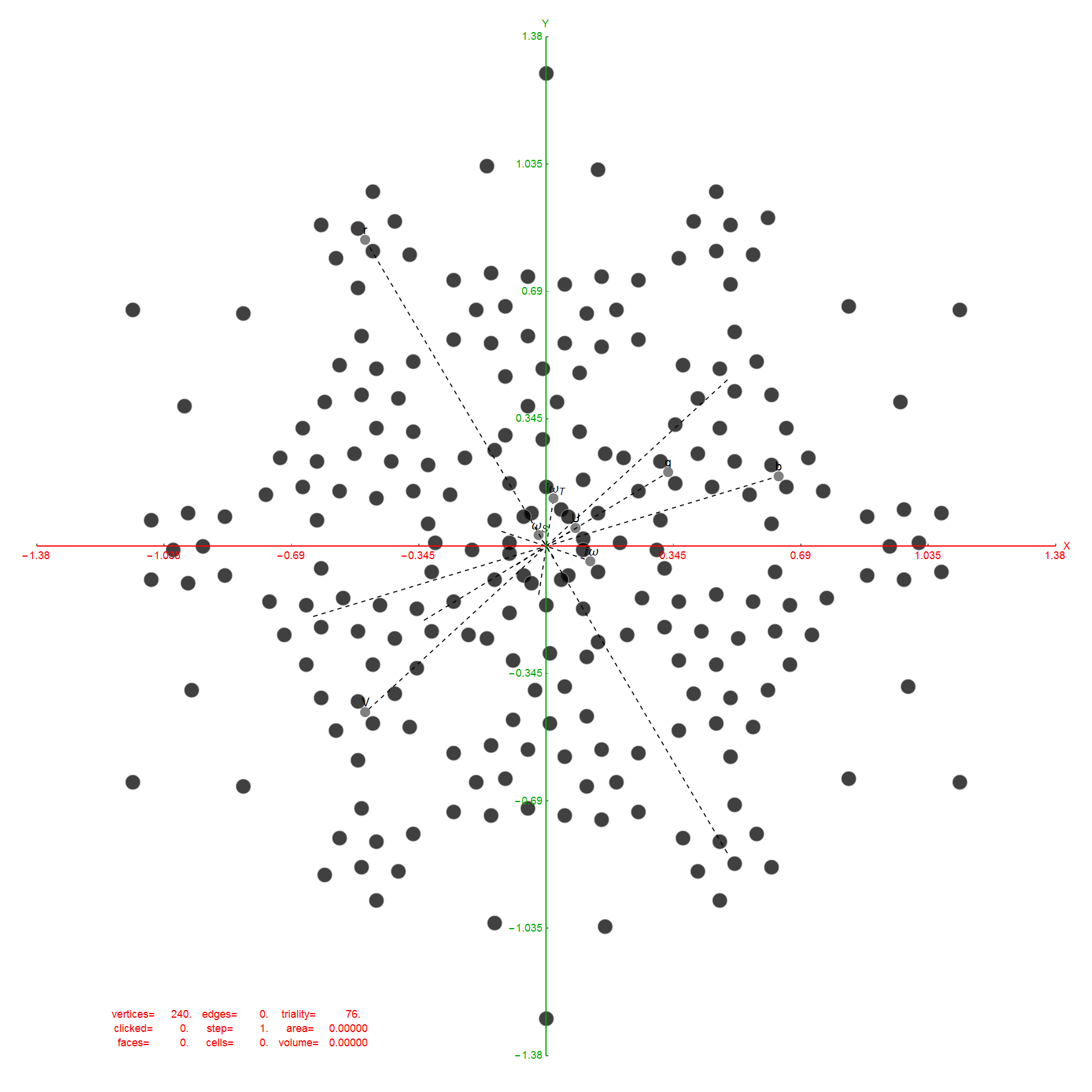
Here it is rendered with H and V reordered to match in VisibLie_E8 tool:
H/V order is {2, 3, 4, 7, 1, 6, 5, 8};
Note: the particle assignments in my VisibLie_E8 tool (as in the Interactive visualizations on this website) are not the same and have different triality rotation matrices.
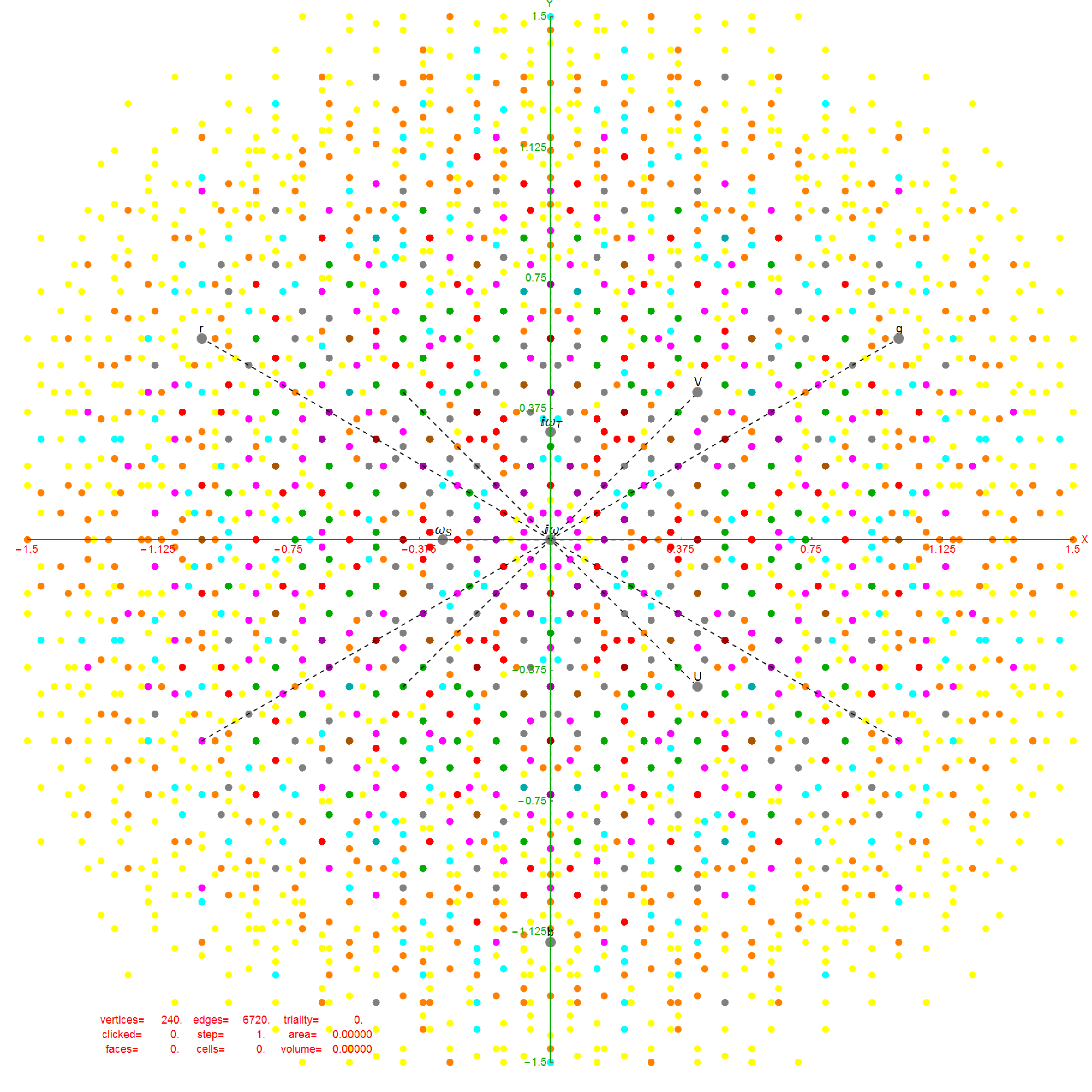
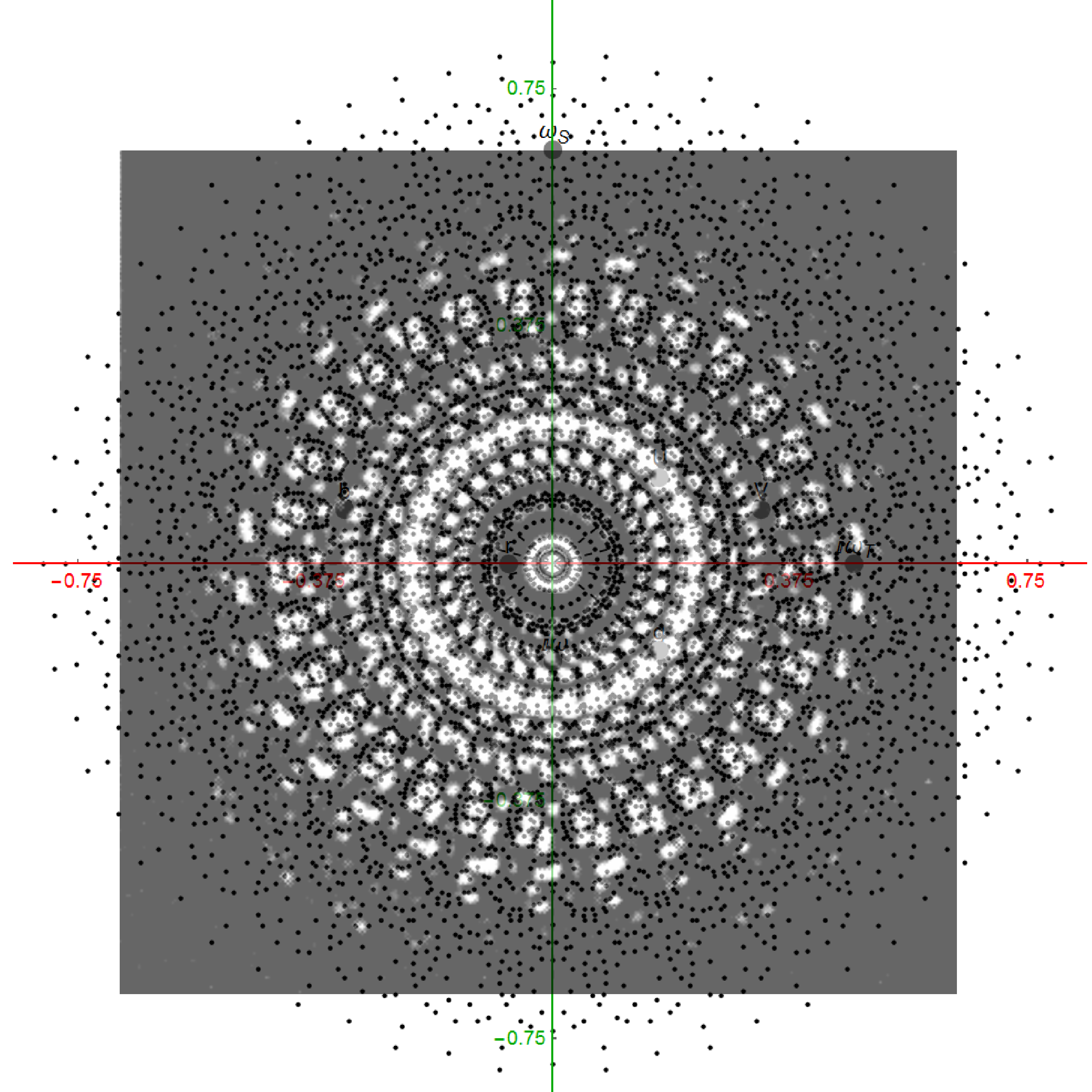
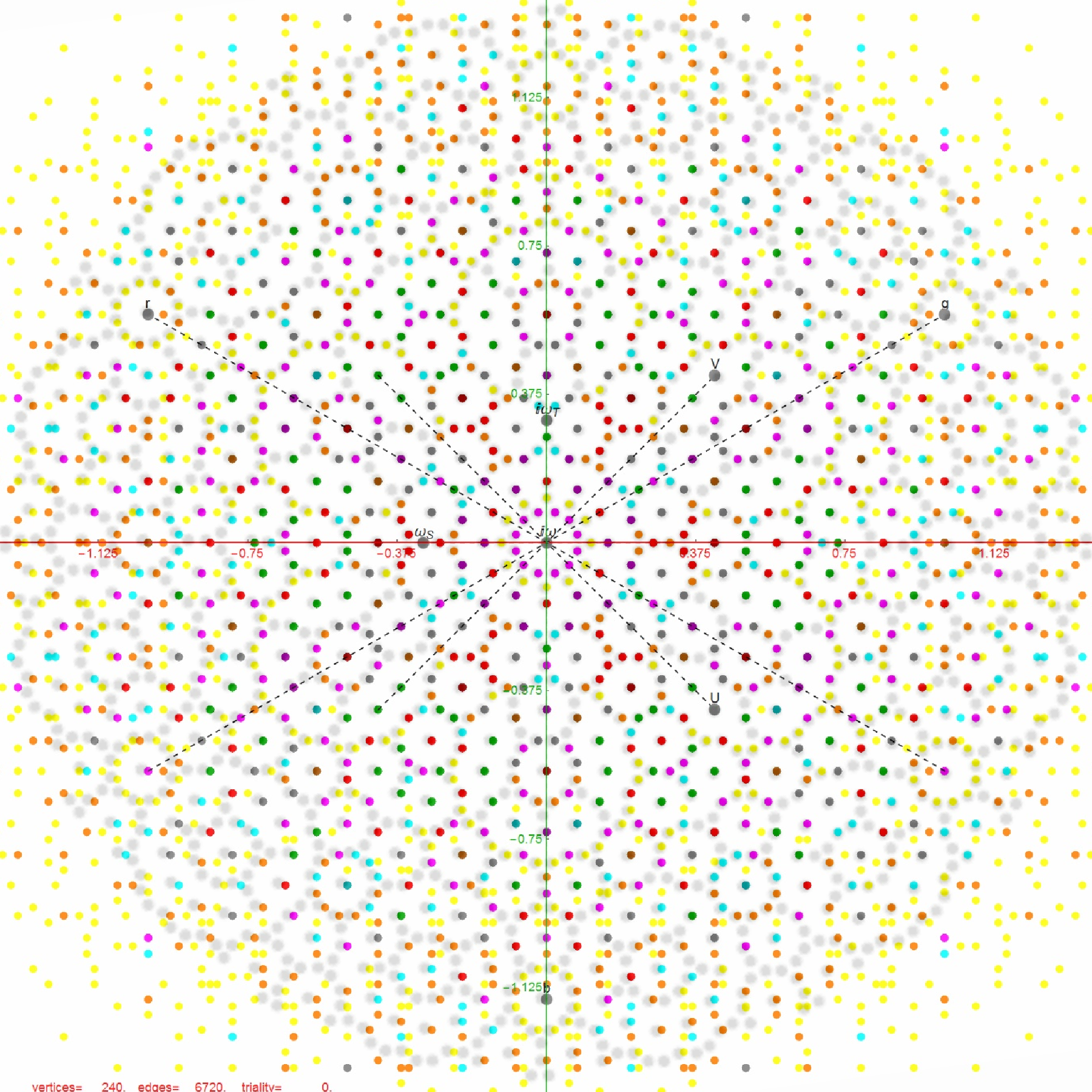
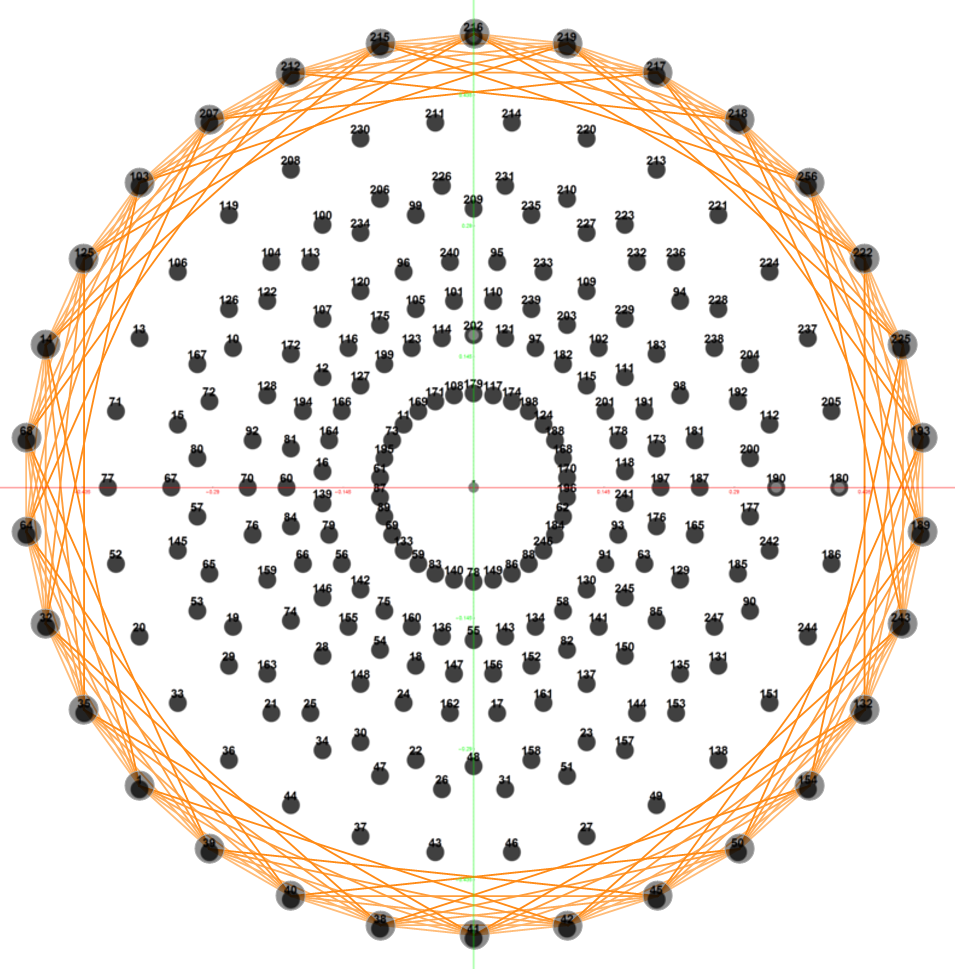
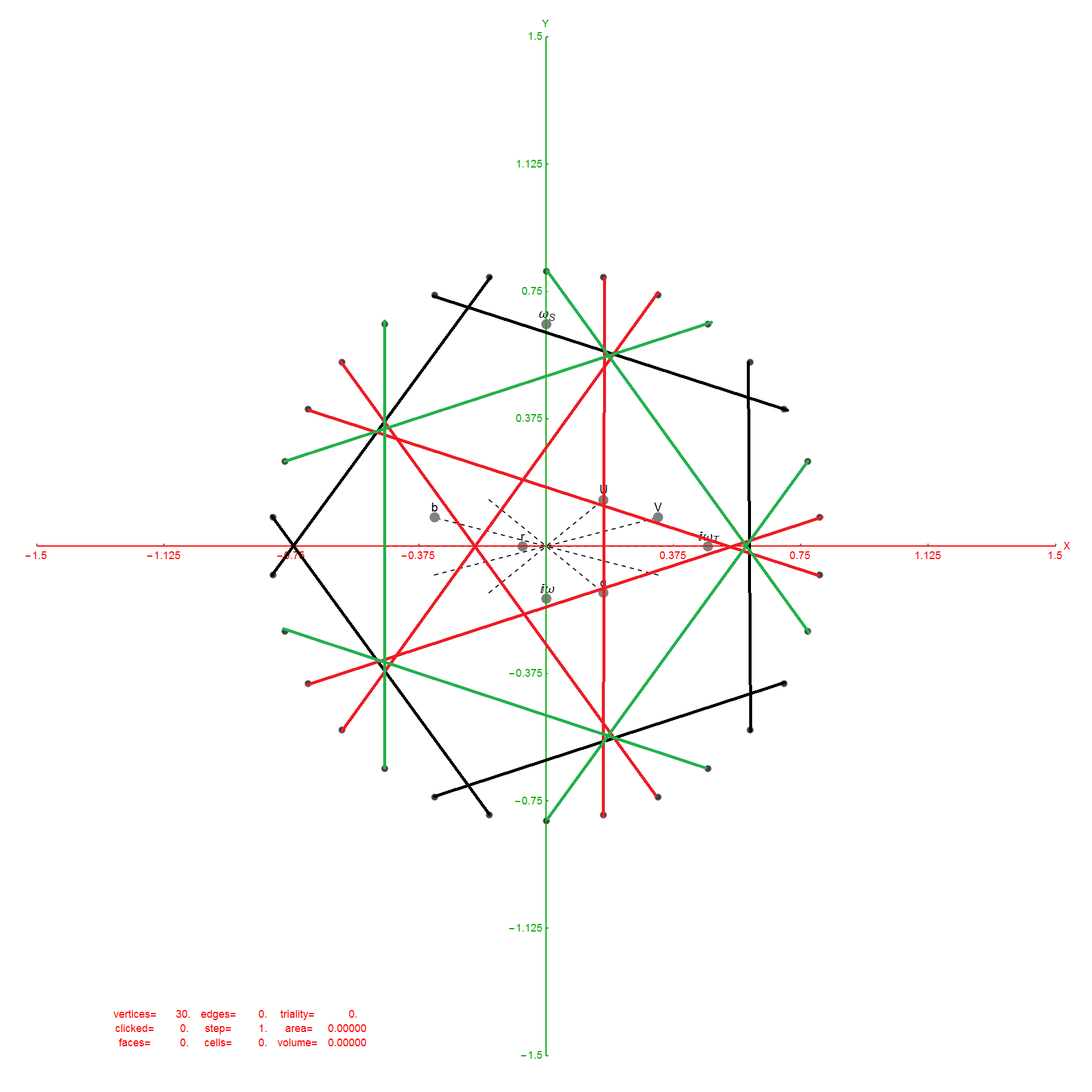
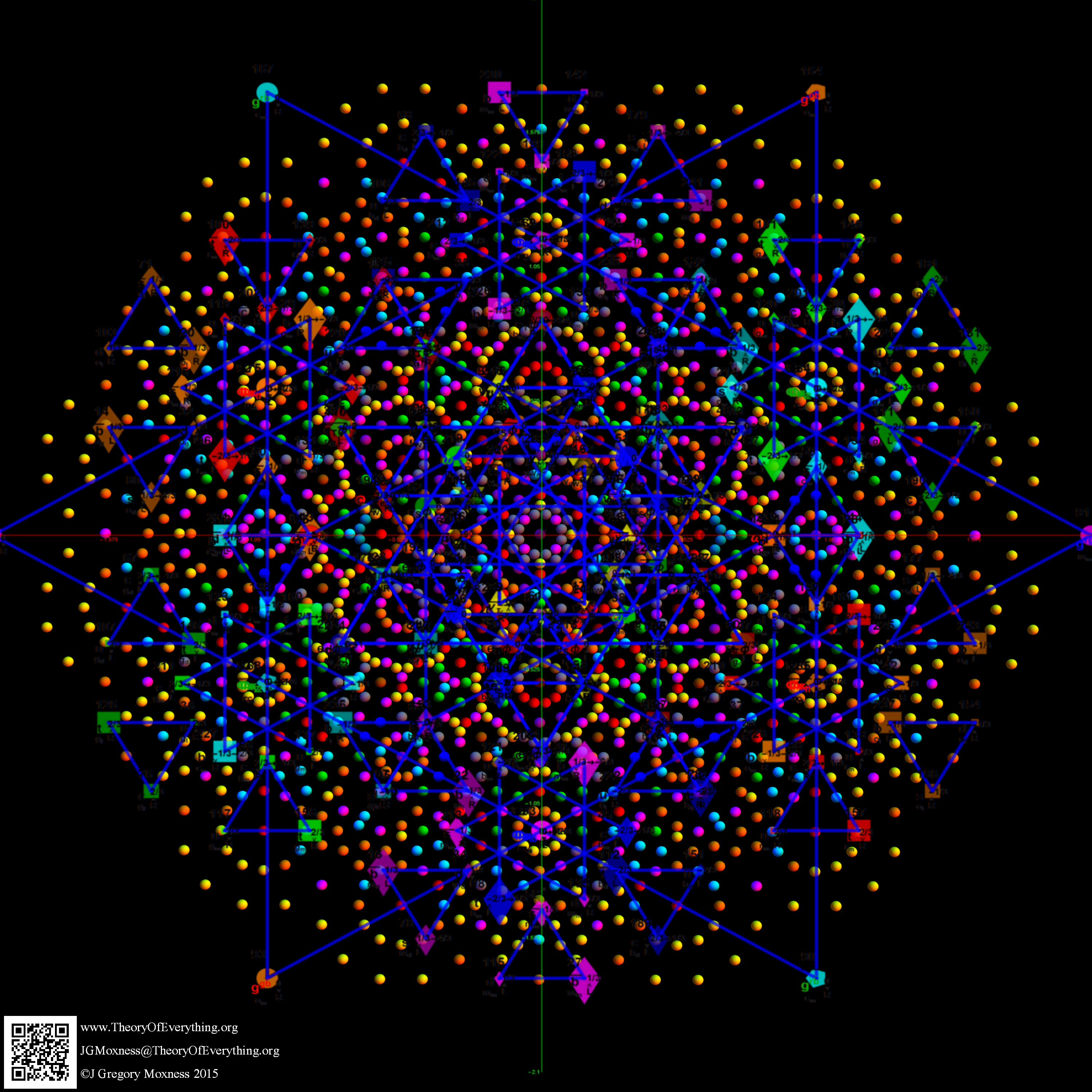
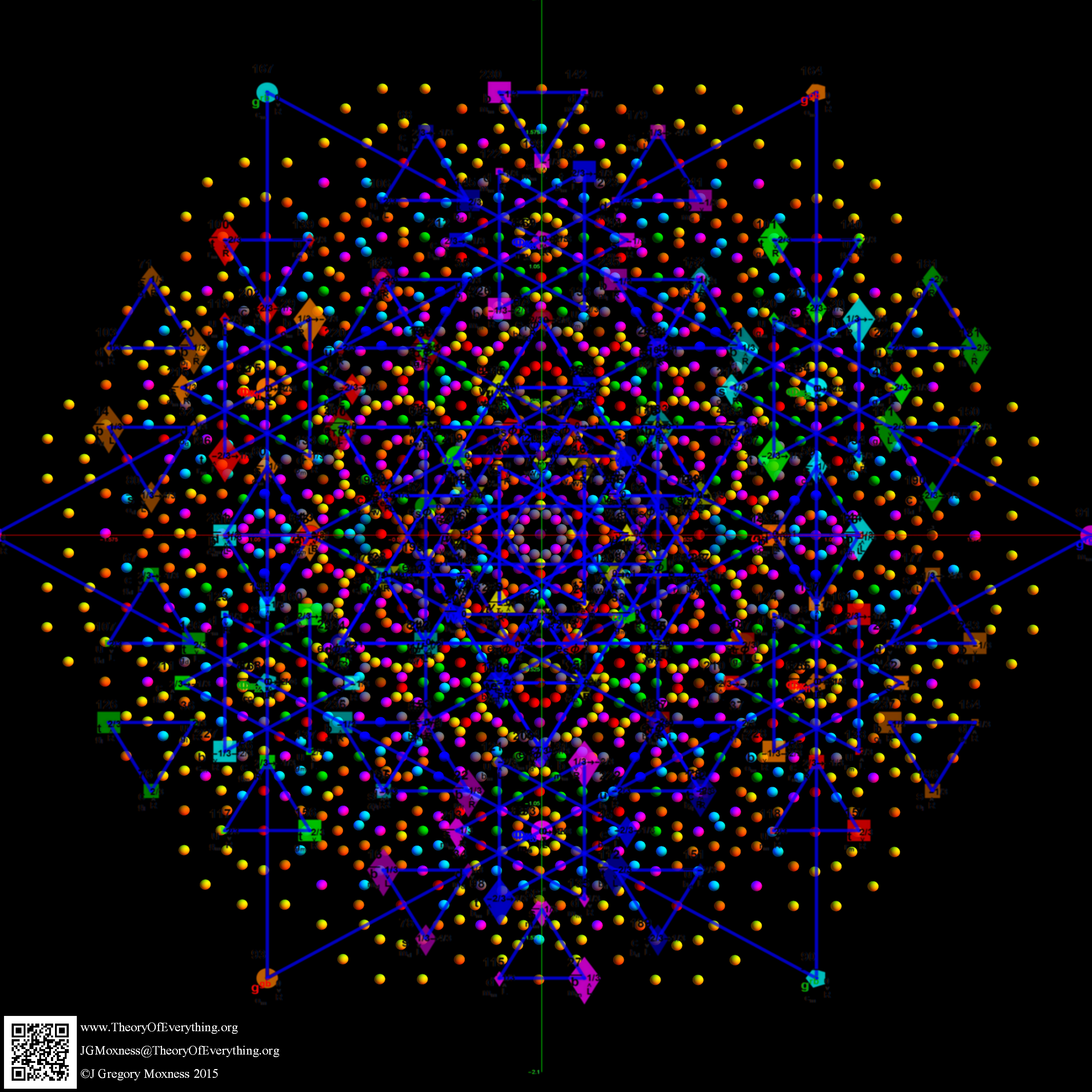
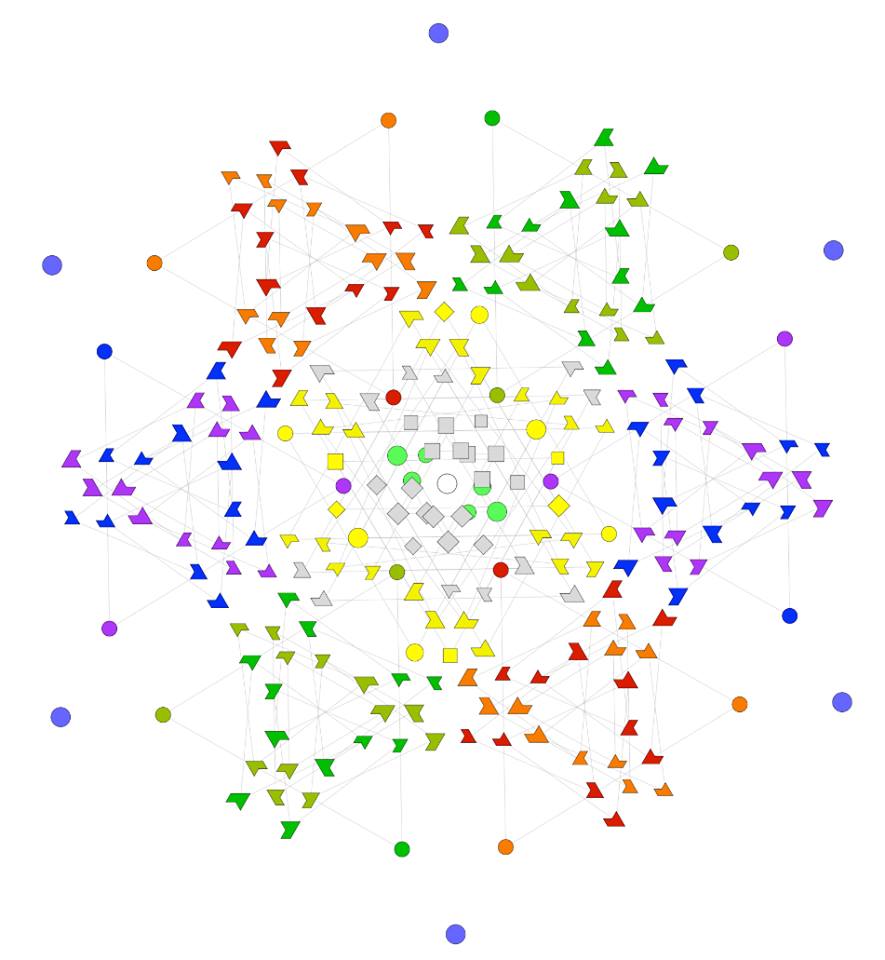
The pic below has a slightly altered projection that creates a bit more hexagonal symmetry and integer projections (without deviating more than .05 off his coordinates):
Note: vertex colors indicate the number of overlapping vertices.
This uses H/V projection vectors (reverse ordered back to his coordinate system).
Symbolic:
H={3 Sqrt[3]/40, 0, 0, 3 Sqrt[3]/40, 1/3, 1/2, 1/2, -2/3};
V={-3/40, 0, 3/20, 3/40, 3/20, -4/5, 1/2, -3/20}};
Numeric:
H={.13, 0., 0.,.13,.33,.5, .5,-.66`};
V={-.075, 0., .15, .075, .15,-.8, .5,-.15};
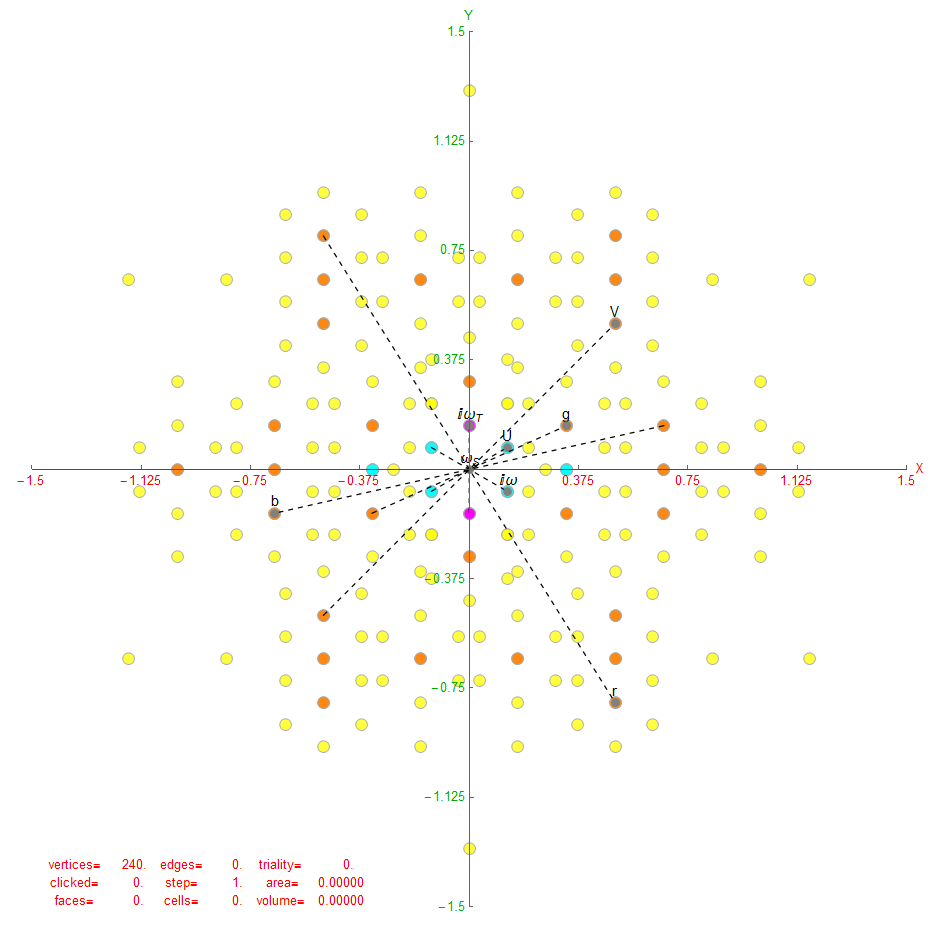
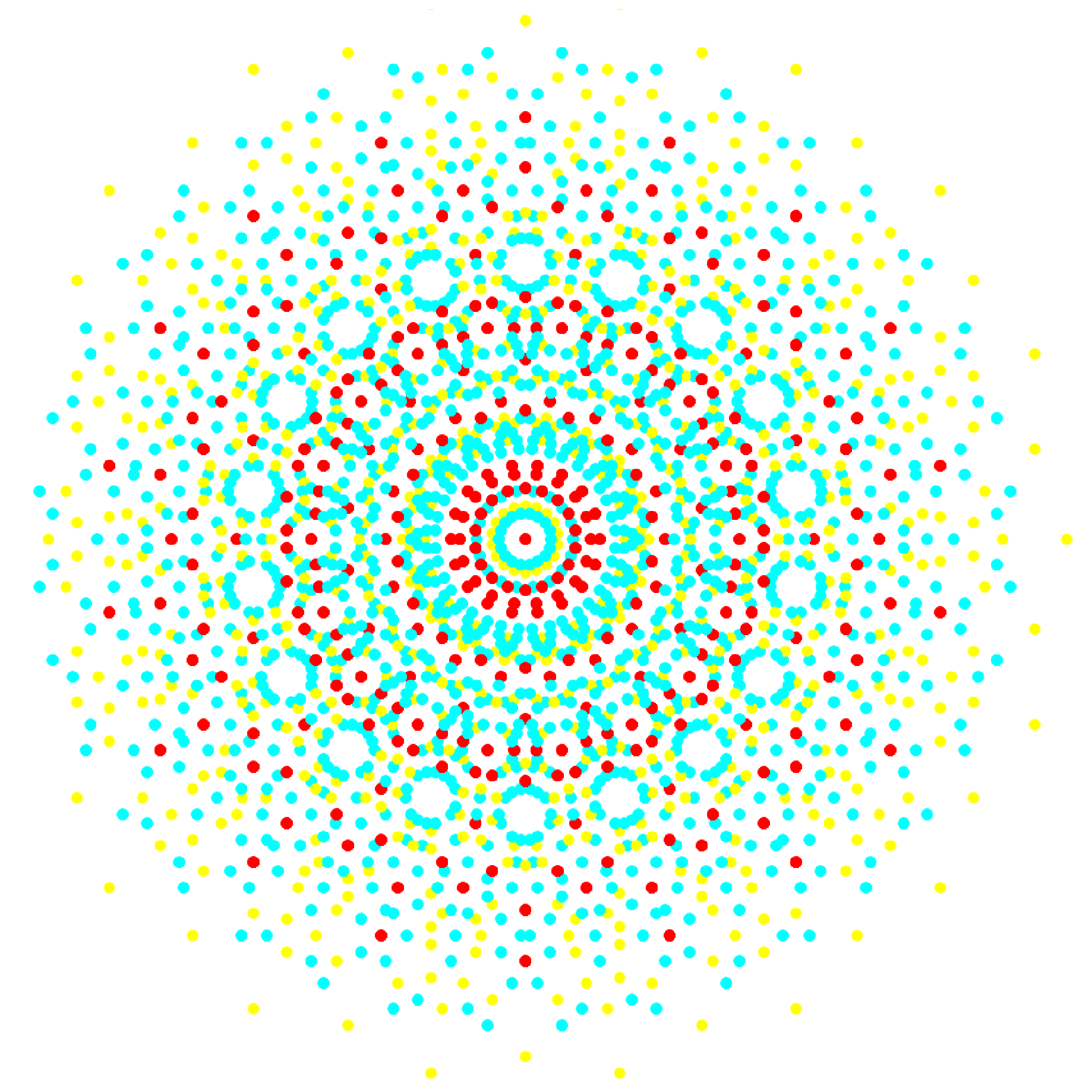
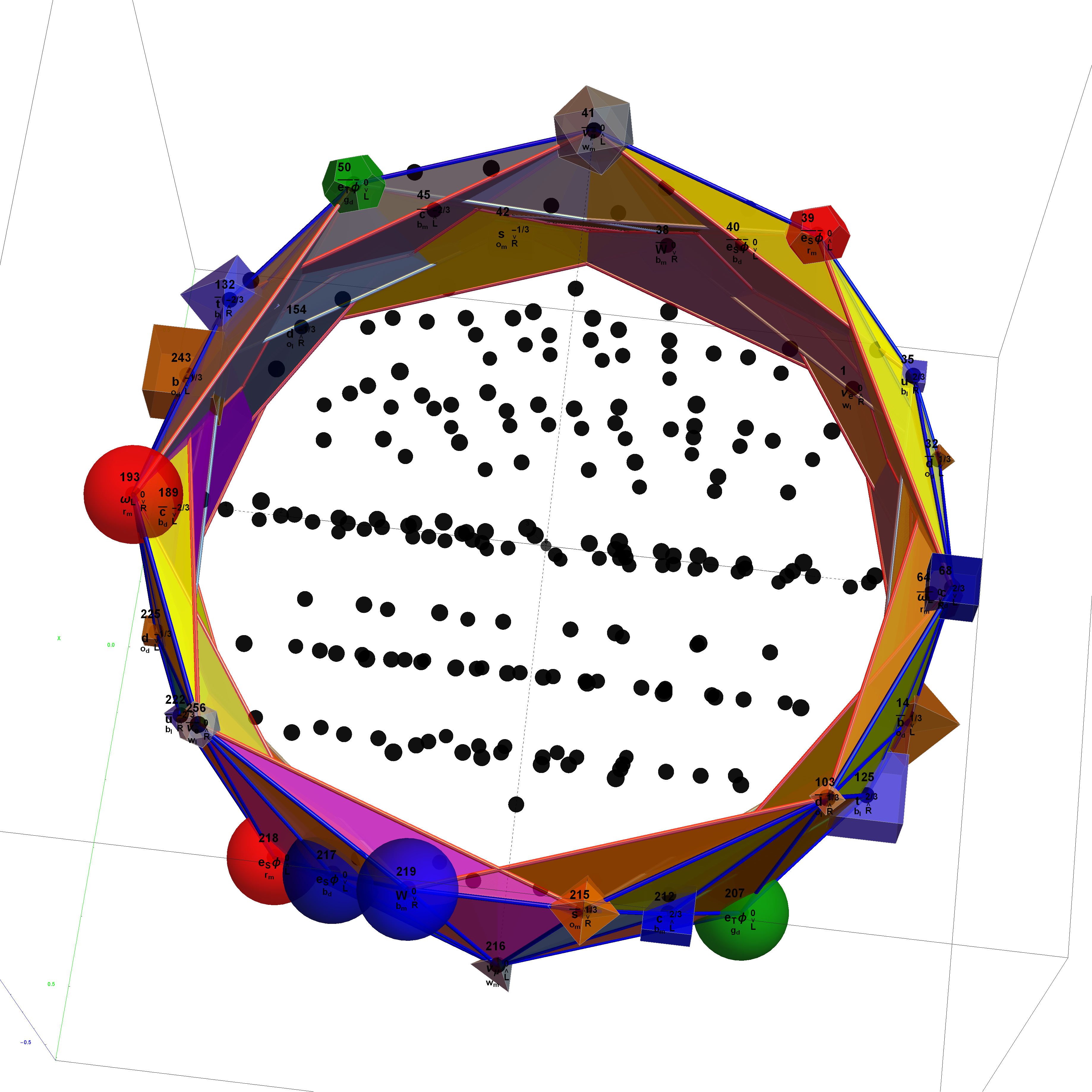
Here is Lisi’s version with my coordinates:
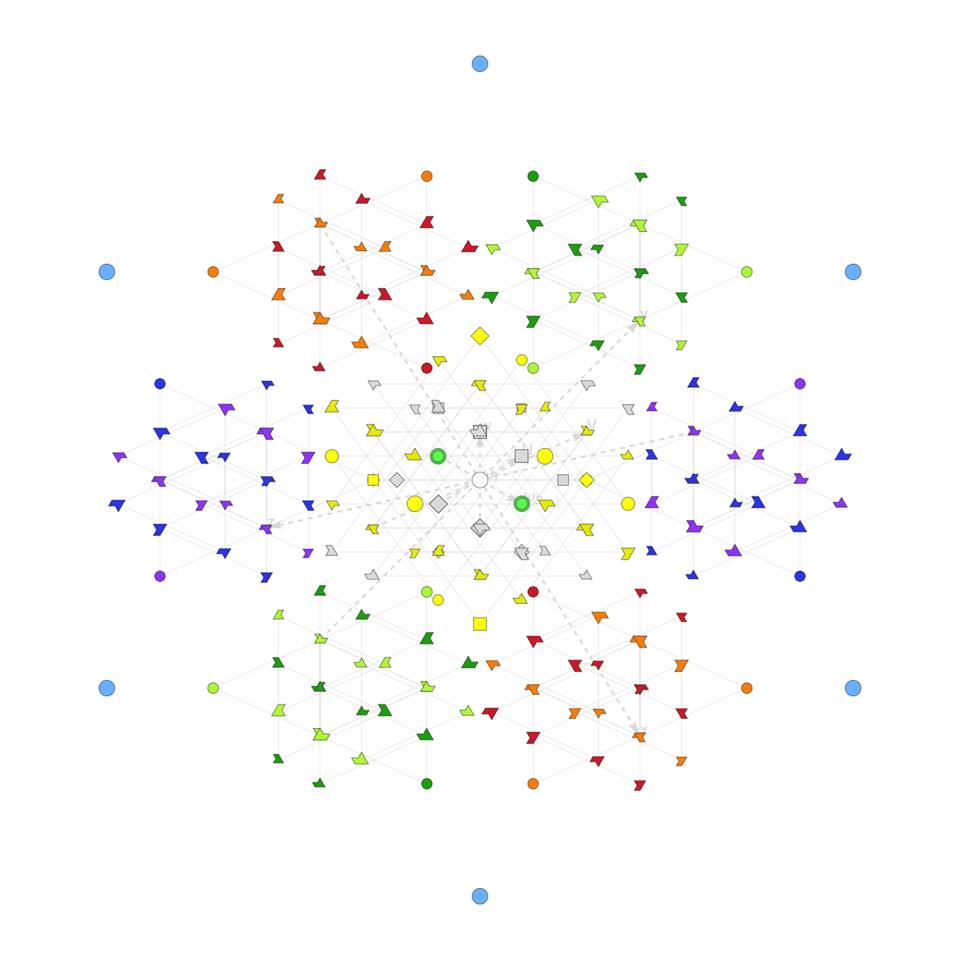
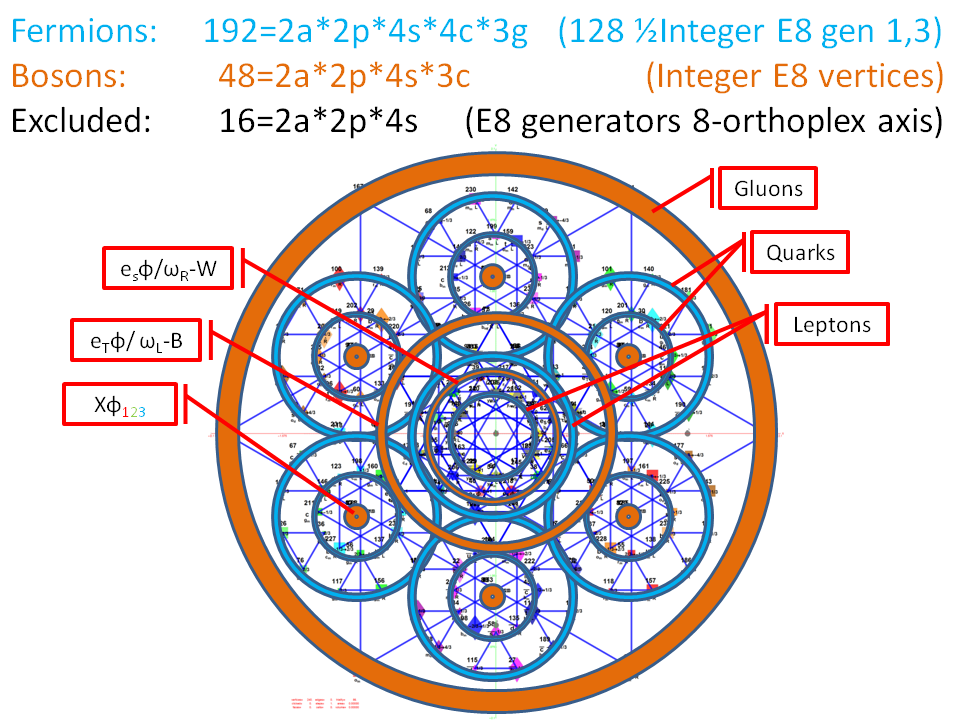
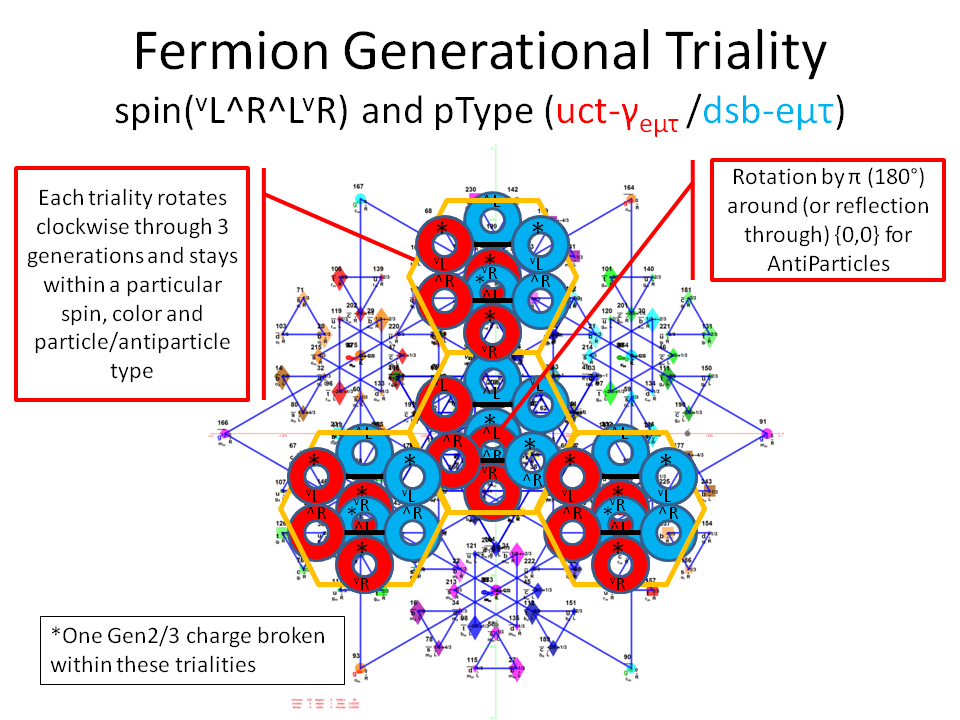
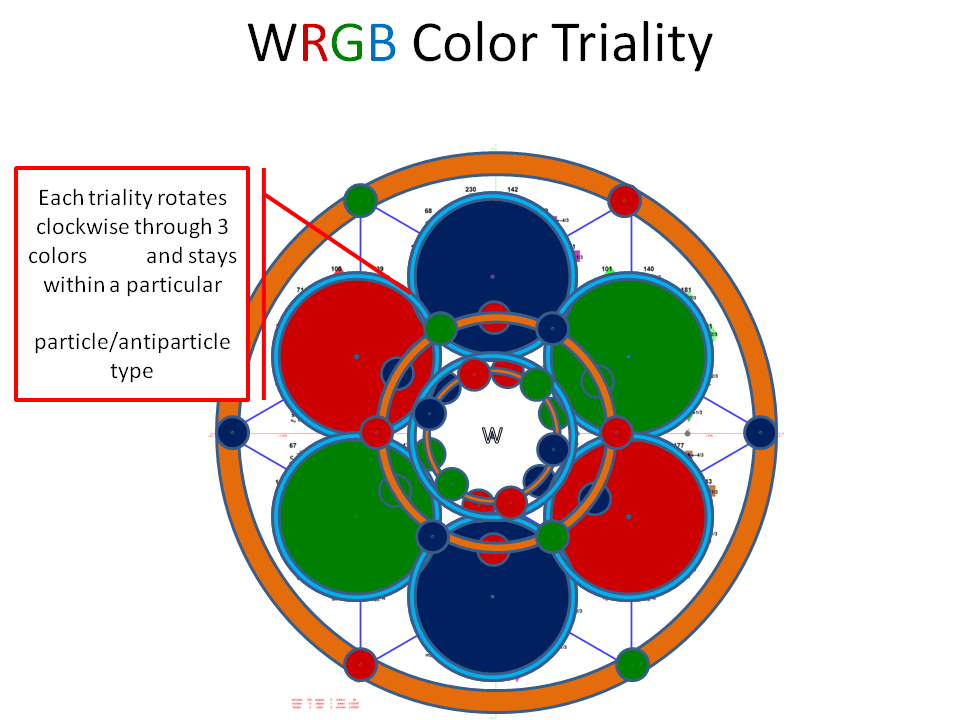
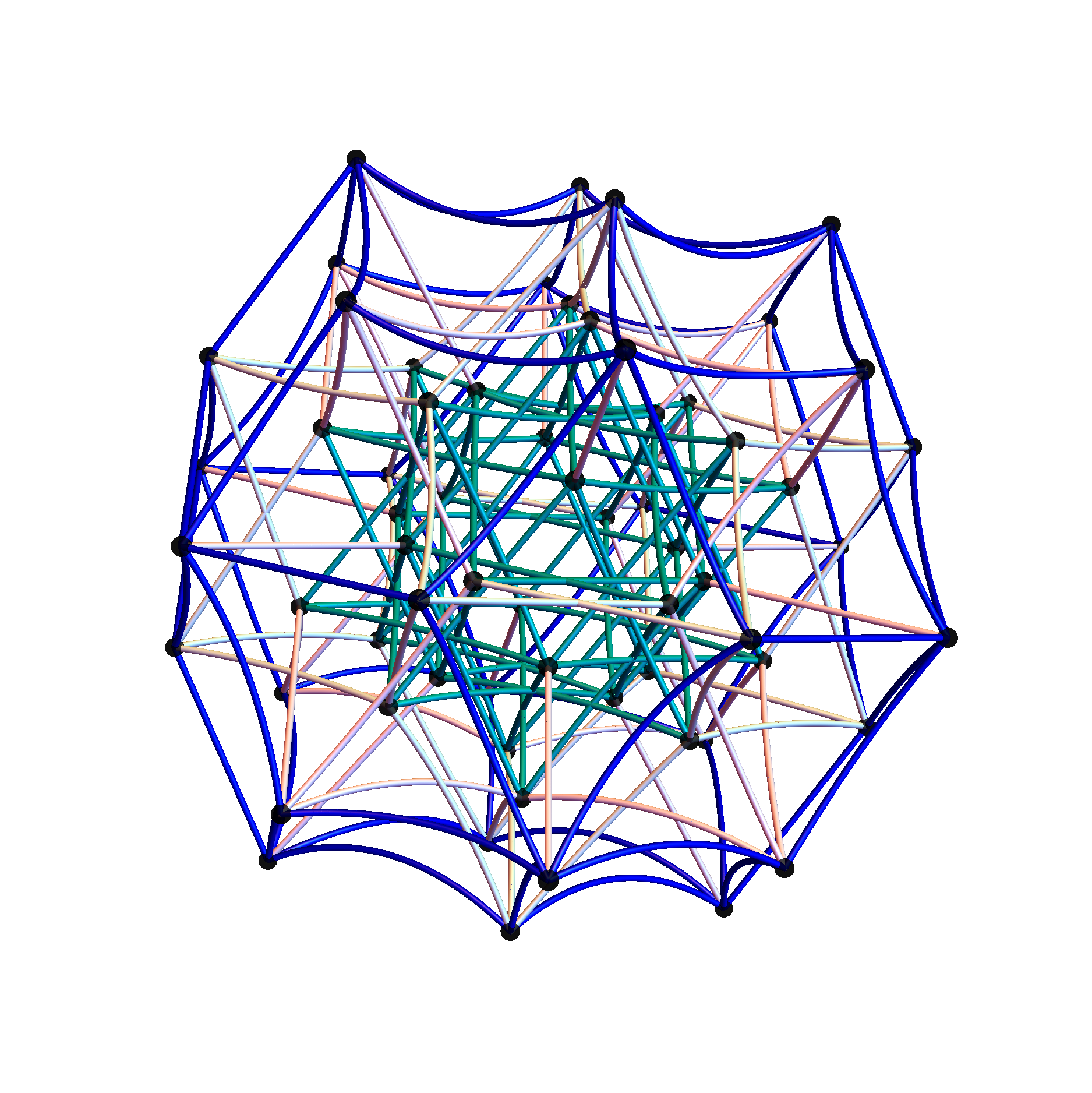
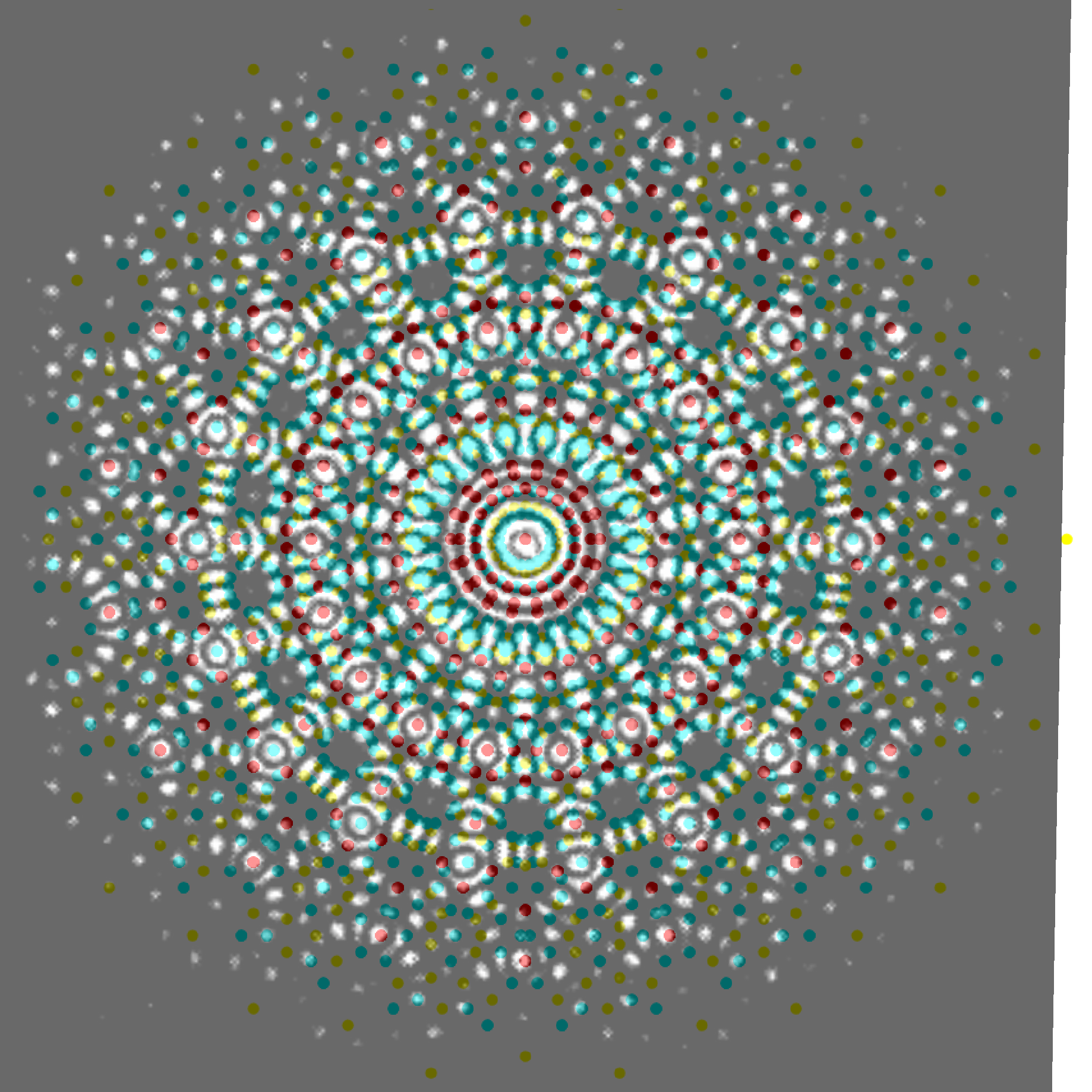
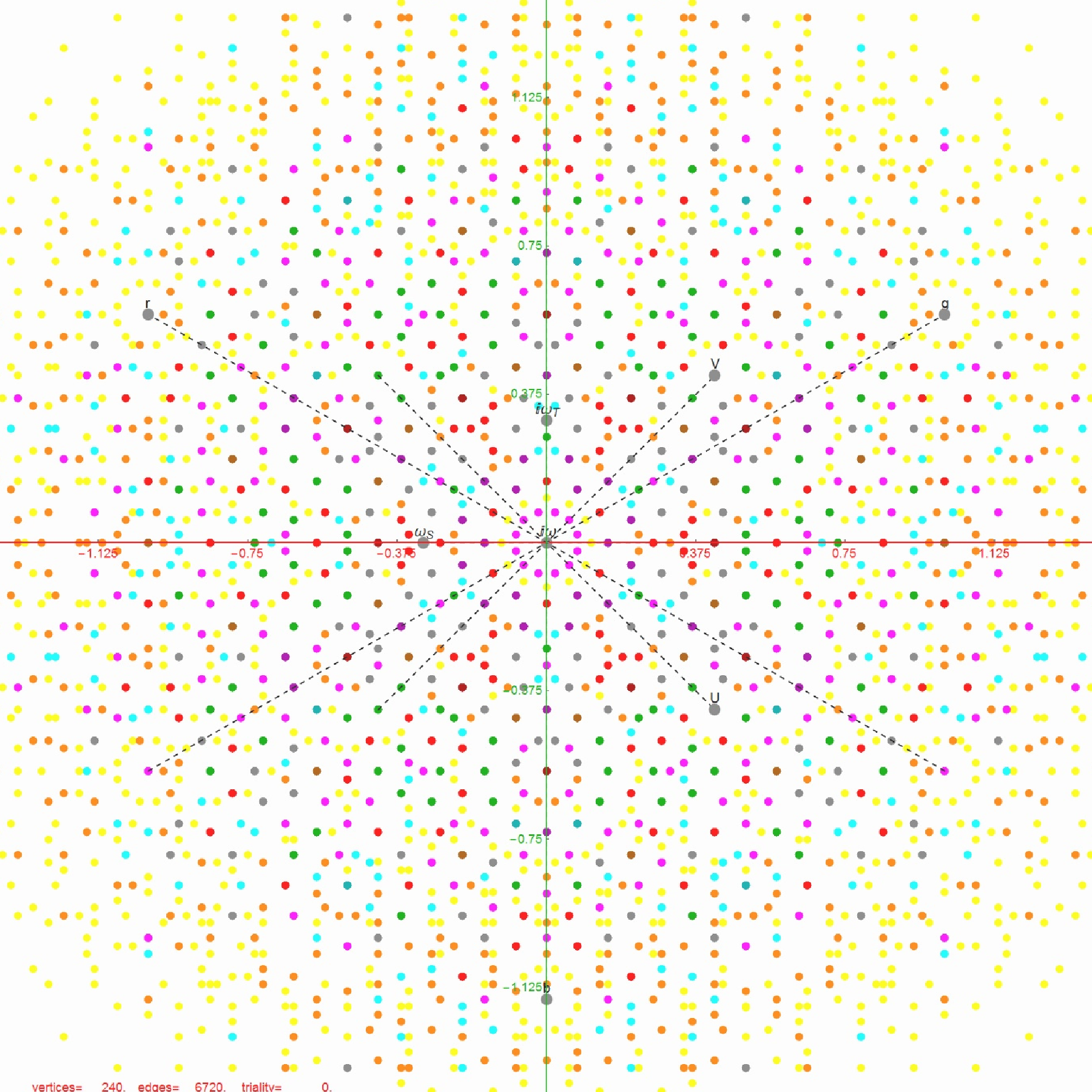
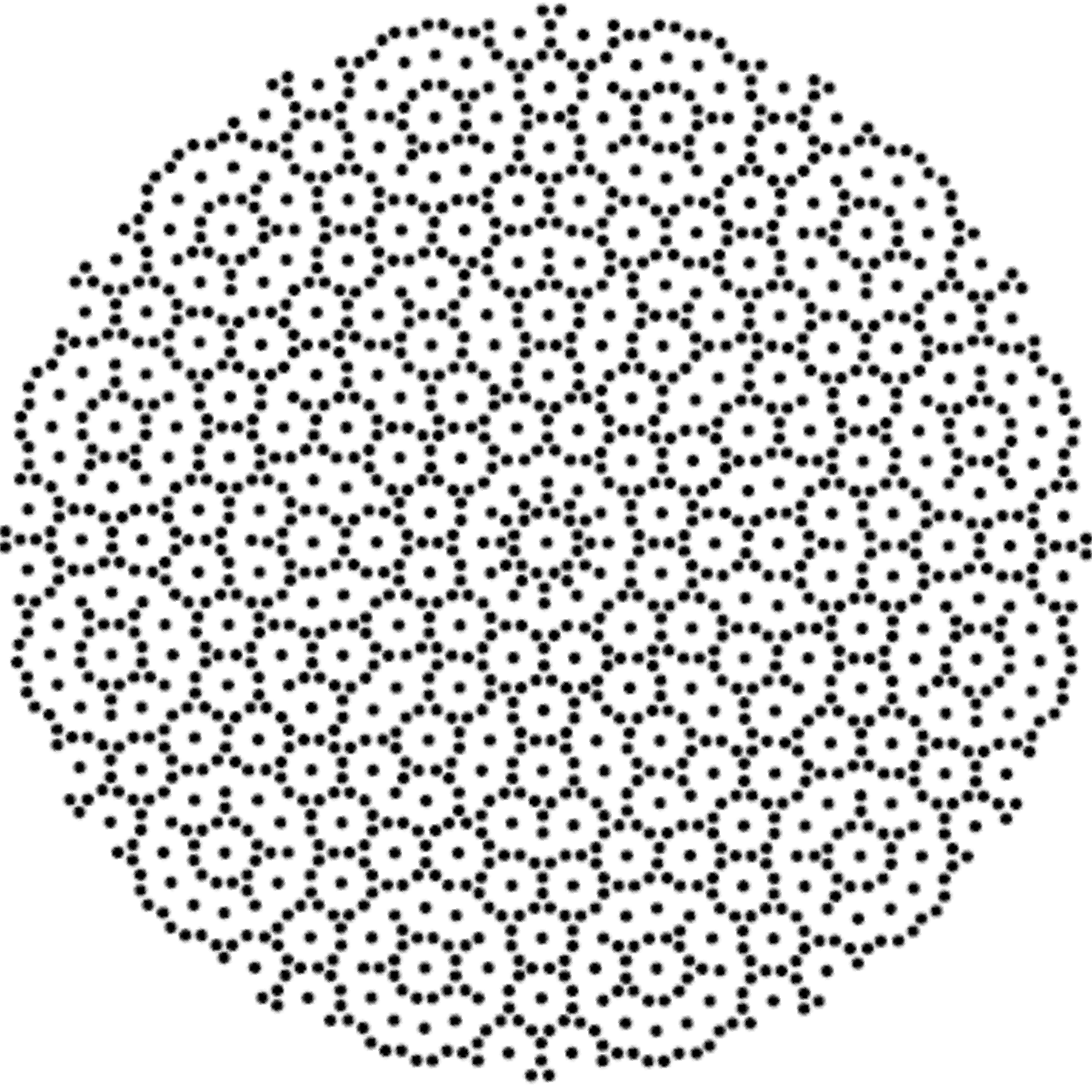
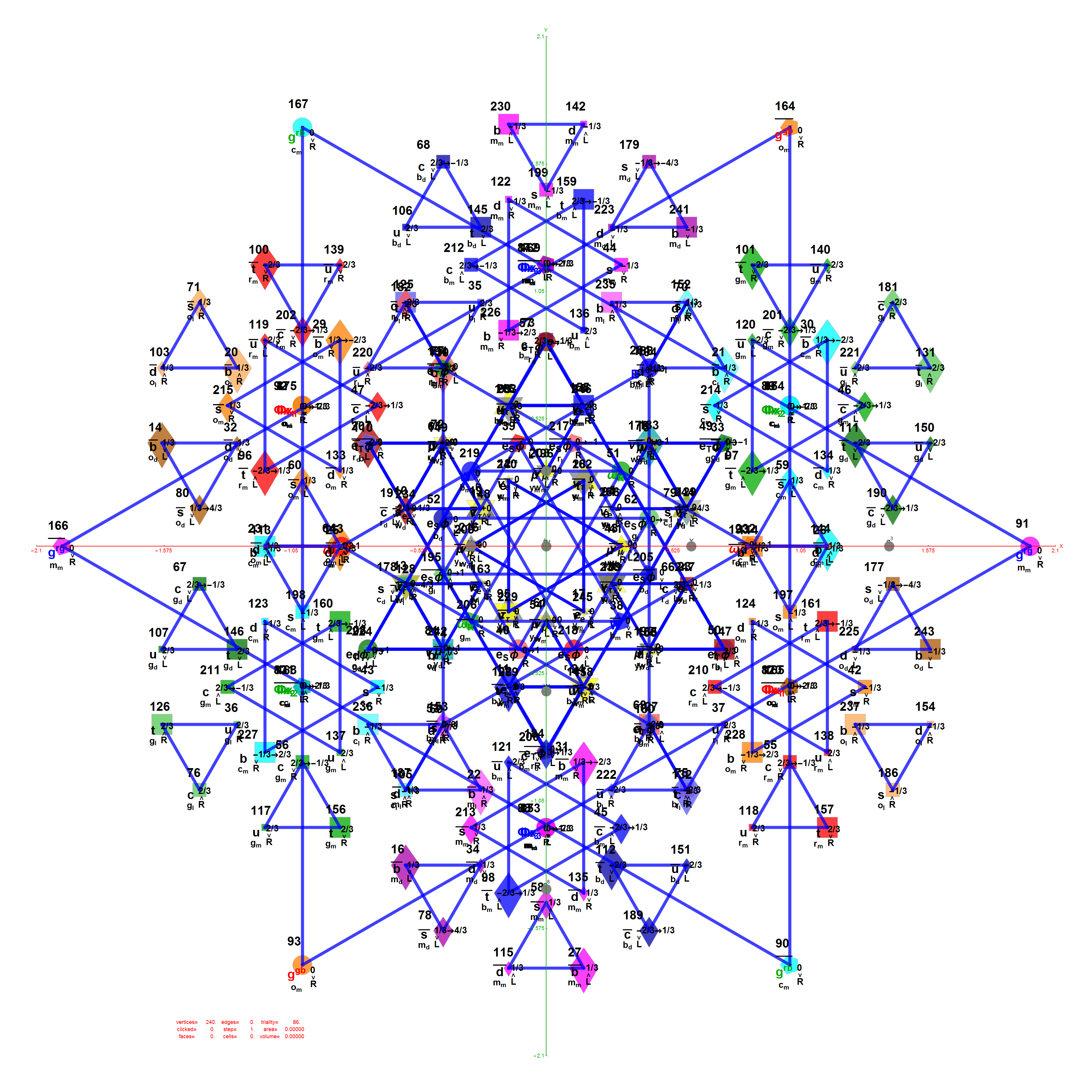
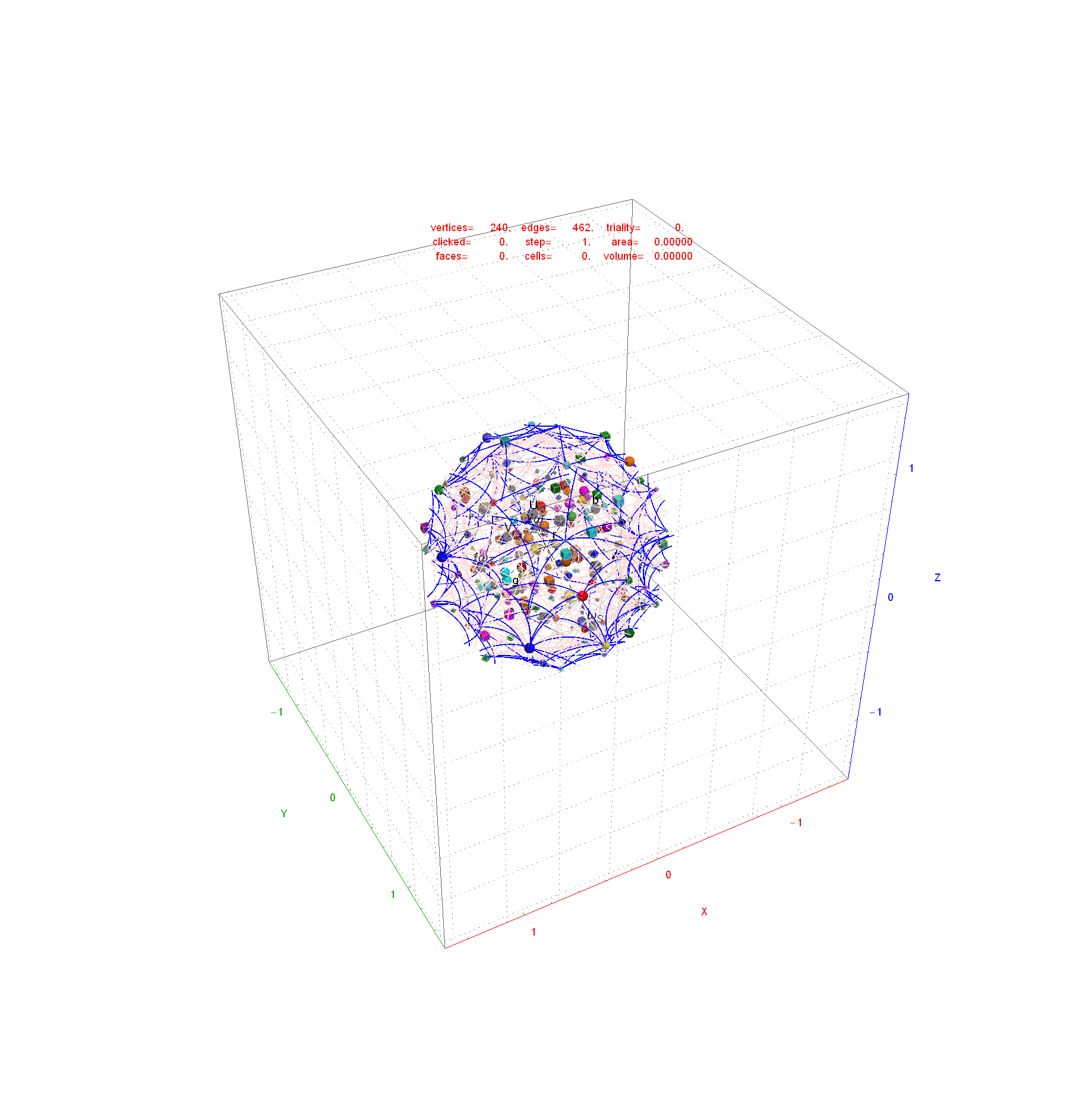
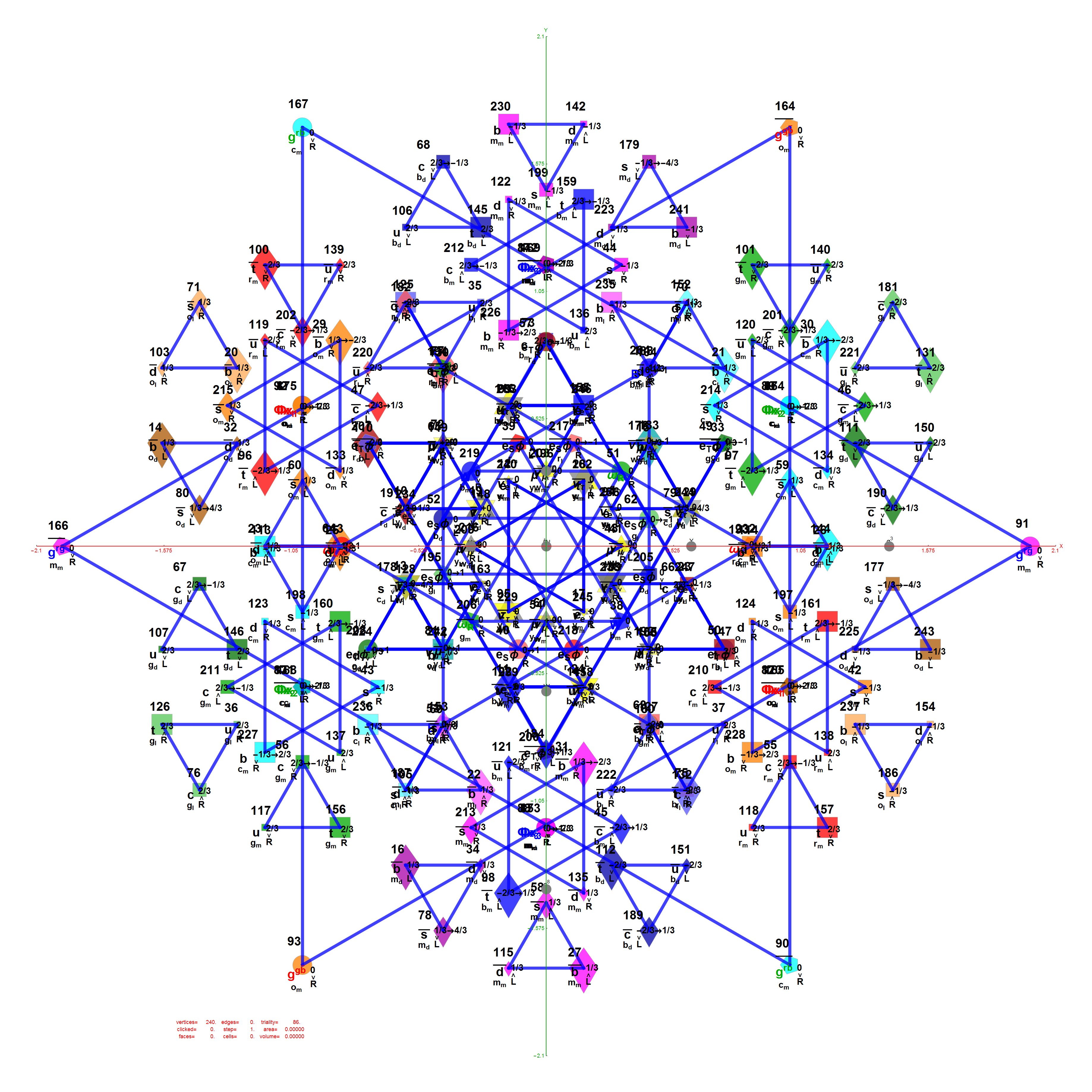
Here is a version of the full hexagonal (Star of David) triality representation using coordinates I found with the same process used above. Particle color, shape and size are based on the assigned particle quantum numbers (spin, color, generation). There are 86 trialities indicated by blue triangles.
Projection vectors (in my “physics” coordinate system) are:
H={2-4/Sqrt[3],0,0,-Sqrt[(2/3)]+Sqrt[2],0,0,Sqrt[2],0};
V={0,-2+4/Sqrt[3],Sqrt[2/3]-Sqrt[2],0,0,0,0,-Sqrt[2]};
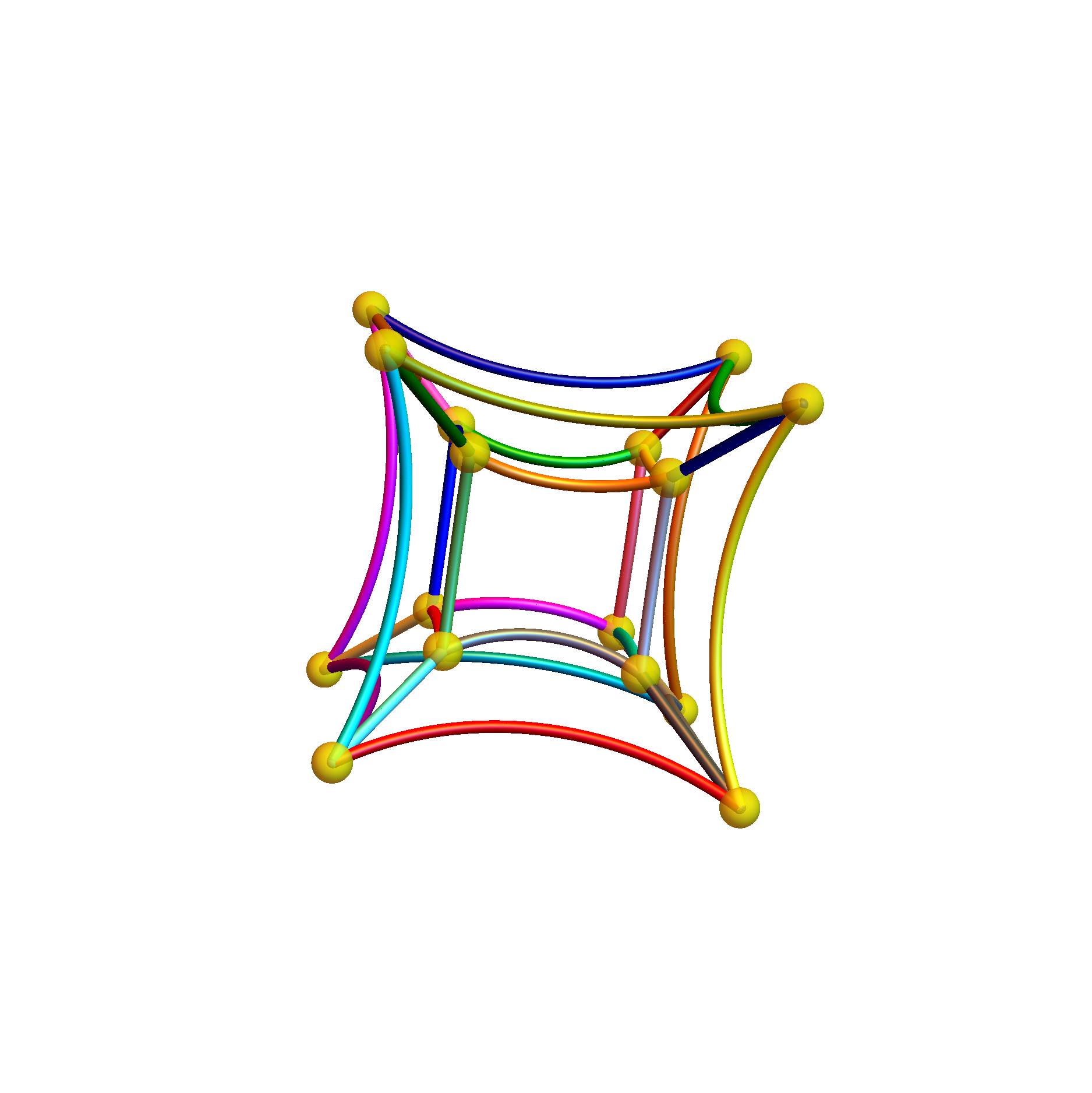
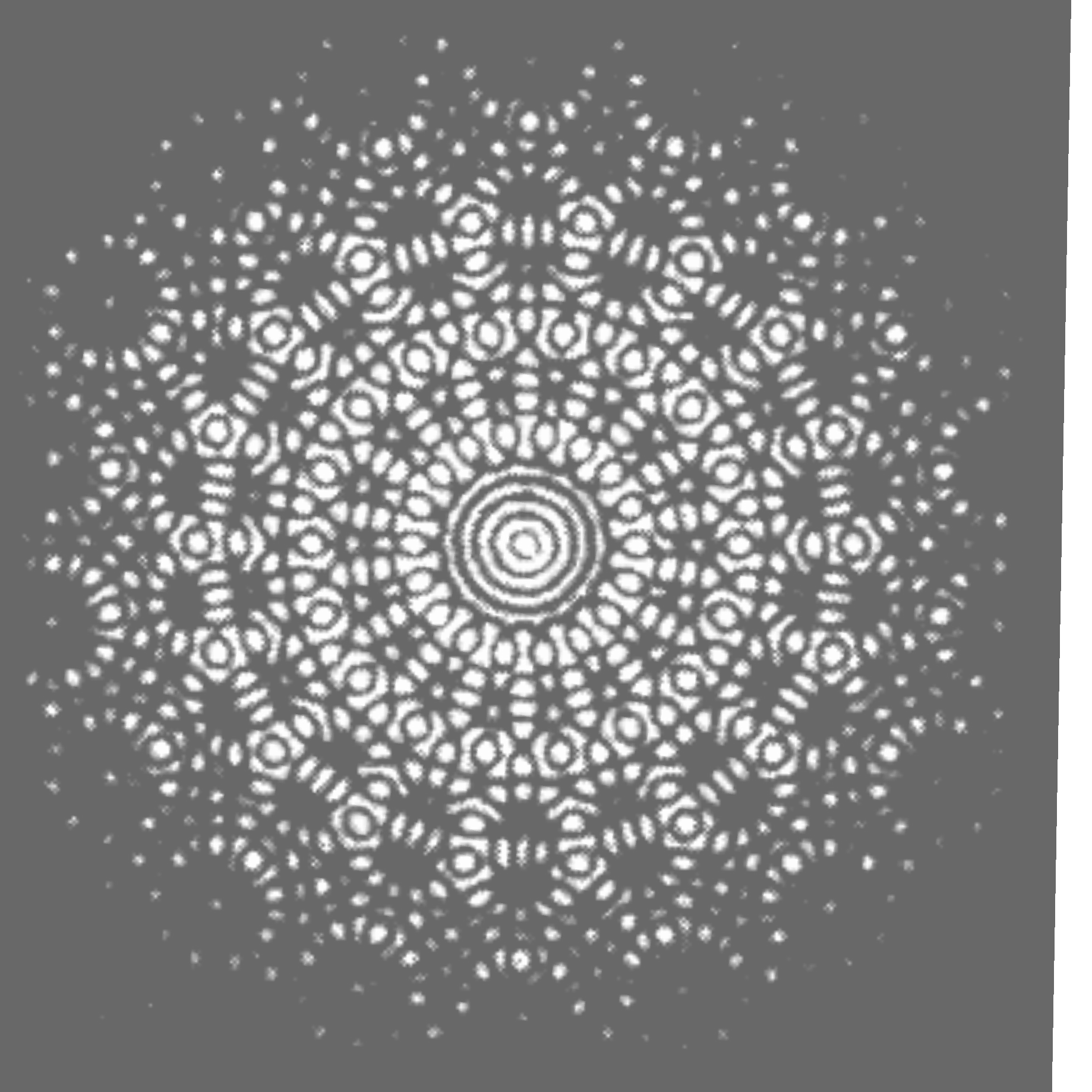
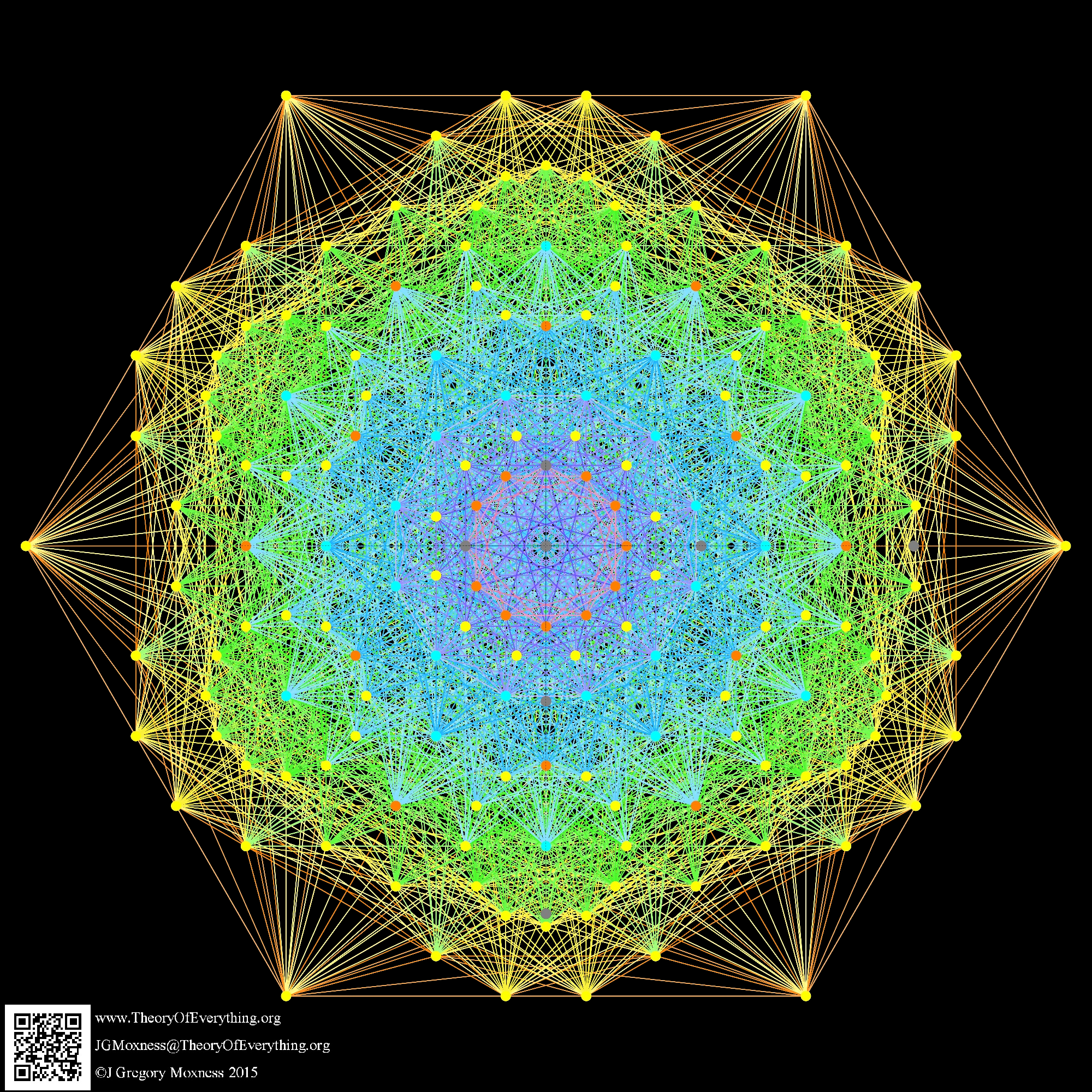
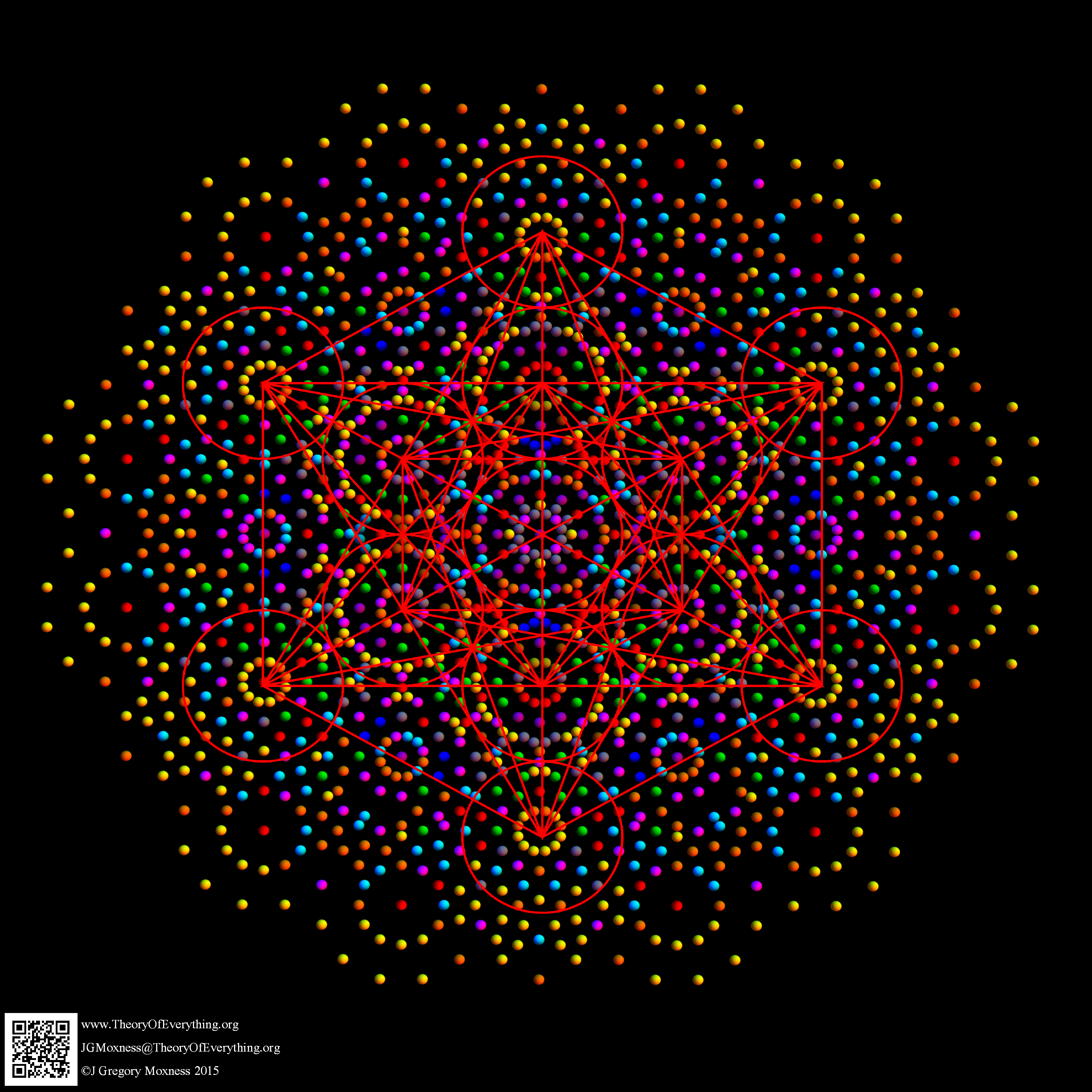
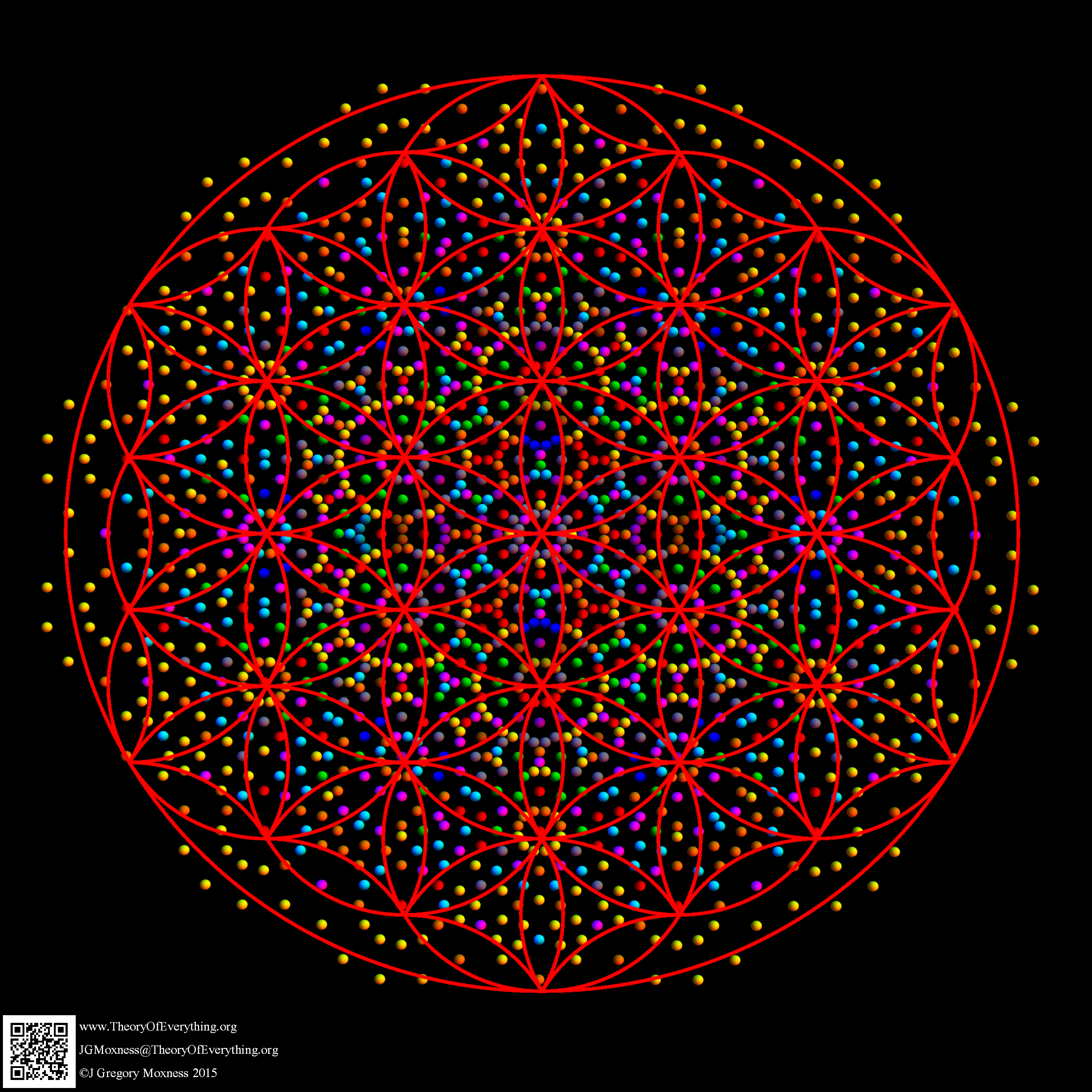
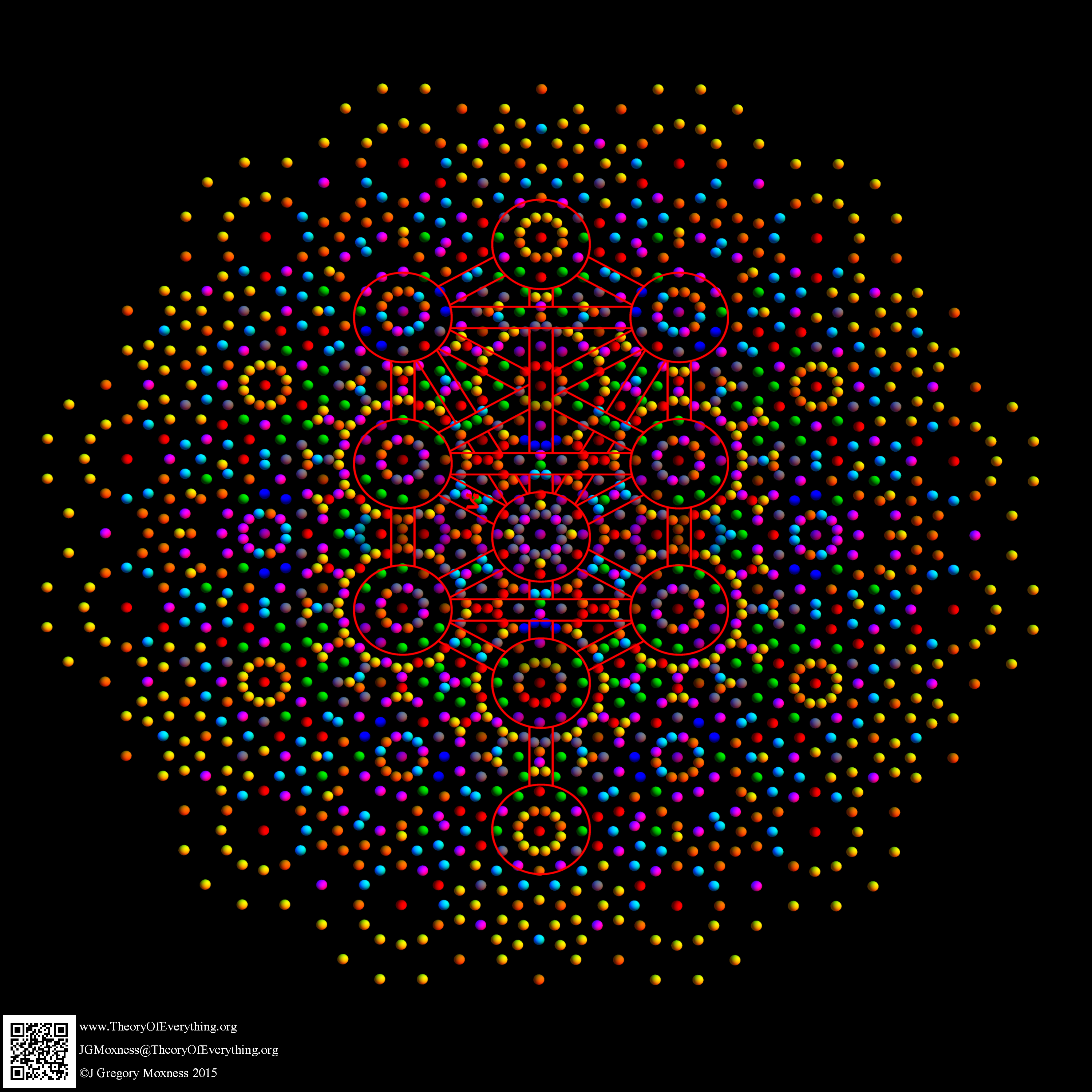
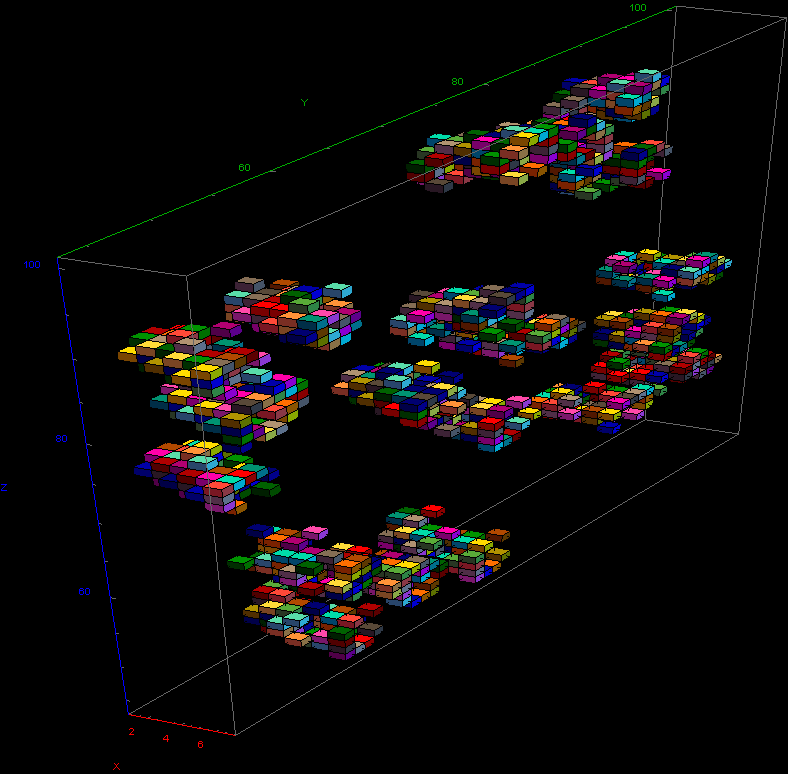
See also a rectified version of this, where the particle overlaps show the inner beauty of E8!!
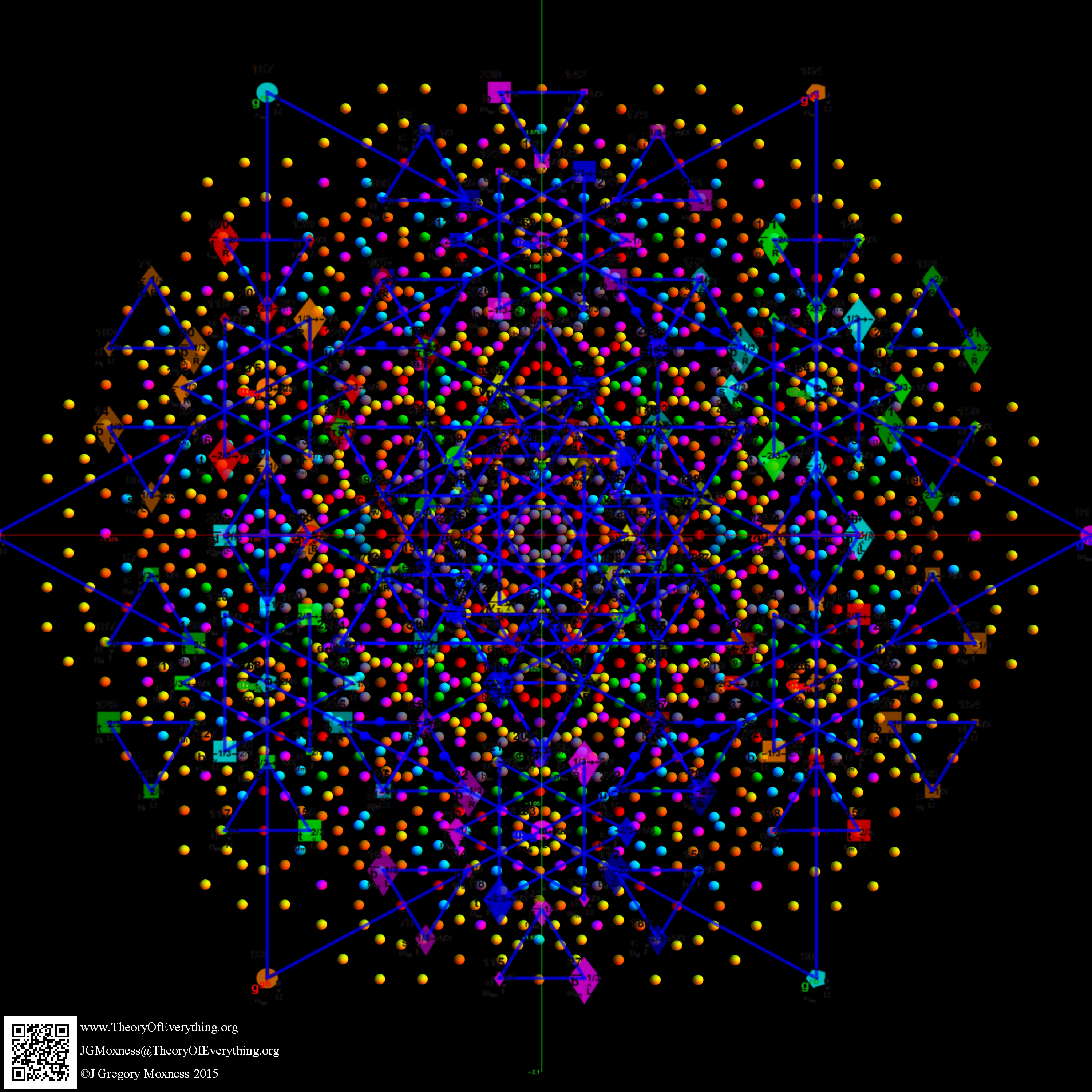
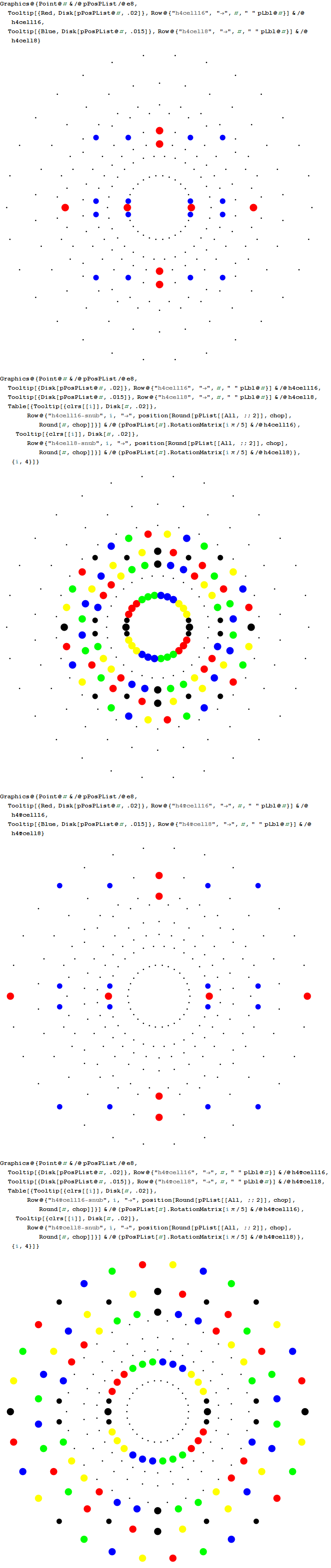
The underlying quantum symmetry patterns within this coordinate system are: